
Studies on situation reasoning approach of autonomous underwater vehicle under uncertain environment
2021-09-06 09:26:36LiliYinDeyunChenHengwenGuNingGuanRuboZhangHandanHou
Lili Yin |Deyun Chen |Hengwen Gu |Ning Guan |Rubo Zhang |Handan Hou
1College of Software&Microelectronics,Harbin University of Science and Technology,Harbin,China
2College of Computer Science and Technology,Harbin University of Science and Technology,Harbin,China
3703th Research Institute,China Shipbuilding Industry Corporation,Harbin,China
4School of Foreign Languages,Harbin University of Science and Technology,Harbin,China
5Department of Computer Science and Engineering,Dalian Nationalities University,Dalian,China
6School of Computer Science,Harbin Finance University,Harbin,China
Abstract The purpose of this study is to provide a situation reasoning module for autonomous underwater vehicle (AUV),to make decision-making agents know what is the current situation,what needs to be done in the present situation,and what is the risk of task present situation.This will enhance efficiency for AUV.Situation reasoning for AUV aims to communicate mission assessments to decision-making agents.Thus,in solving this problem,it is important to design a new situation reasoning module for AUV.This article is presenting the situation reasoning module for AUV,which includes uncertain event detection,uncertain event recognition and ontology model of the situation.The article concludes by demonstrating the benefits of the situation reasoning module in a real-world scenario.A situation reasoning simulation is demonstrated in an AUV while performing a complex mission.The approach was validated by marine experiments and simulating experiments for AUV.Results show the effectiveness of situation reasoning approach.
1|INTRODUCTION
Autonomous underwater vehicle (AUV) is in high demand within the offshore industry and maritime research,mainly used for bathymetry and data acquisition.With the growing use of AUV and the increasing amount of sensed information in modern maritime operations,this fact entails a lack of reasoning of the available information's overall meaning with human-like capabilities,that is a lack of situation reasoning(SR),which can perceive the uncertain environment,understand the situation,locate and interact with environmental elements,and communicate mission assessments to revise the mission plan.The definition of SR is based upon the conception of situation awareness (SA) [1-3],which is the human's ability to perceive the environment,comprehend the situation,project that comprehension into the near future,and determine the best action to execute.First,the study of SR Framework(SRF)for AUV is focused.The output of the SR framework can trigger an autonomous re-planning timely.Second,there are two sources providing information to SR framework:the domain knowledge extracted from the original expert and the inferred knowledge from the processed sensor data.In both cases,it will be necessary for the information to be stored,accessed and shared efficiently by SR and planner.So,a situation ontology model for hierarchical distributed representation of knowledge in SR is presented,which can gain access to the different levels of information and might also contribute to the enrichment of the knowledge.Third,the method of SR is studied,which can detect uncertain events and recognise the impact situation of events on AUV's ability to execute the actions necessary to accomplish the mission objectives[4,5].The framework of SR is based upon existing research in framework of SA.The main frames used for SA are data fusion architecture [6],intelligent circulation [7],Joint Directors of Laboratories data fusion model [8],OODA (Observation,Orientation,Decesion,Action) loop [9],SA global assessment technique [1],Dasarathy model[10],Omnibus model[11],The extended OODA model[12],knowledge representation model [13],intelligent control framework [14,15] and model-based diagnostics [16].Several knowledge representation approaches can be found in the literature implementing information transfer protocols for robotics[17].The major challenge in SR is the reasoning method,which needs reasoning under uncertainty and communicating mission assessments to unmanned vehicle.The main methods used for reasoning under uncertainty are template matching,expert system,plan recognition,Bayesian networks,neural network and blackboard model,etc.
Through the analysis of related work,the AUV SR method has the following two challenges.(1) the approaches are still limited to the observation or perception level of SR.Only the uncertain events produced by the actuators and sensors of AUV can be perceived.There is almost no perception of environmental and mission uncertain events,and it is cannot judge the degree of situational threat of the current integrated environment according to the impact of uncertain events on the AUV task.(2) Although the traditional AUV can perform all kinds of tasks according to the environmental knowledge representation model and task type,the current AUV's environmental knowledge representation model uses different knowledge representation forms to represent the external environment characteristics,state characteristics or task characteristics.Therefore,it is necessary to use a single form of knowledge representation to express the whole SR system,so that the decision-making module can dynamically extract different levels and types of SR results in each stage.In this way,situation ontology model has natural hierarchy,structure and inclusiveness,which can reflect the sharing and reusing of knowledge and the interoperability of the system [17].
Therefore,this article presents the SR module for AUV,which includes uncertain event detection,uncertain event recognition and situation ontology model.The uncertain event detection method was based on ontology reasoning [18] and fuzzy logic.The uncertain event recognition method was based on a Bayesian network.The results of uncertain event detection and uncertain event recognition were utilised for the update situation ontology mode,which is extended by probability description.The situation ontology model uses a single form of knowledge representation to convey the knowledge of the SR system.Decision-making module can dynamically extract different levels and types of SR results in each stage.In order to improve the efficiency of AUV task execution,it is necessary for AUV to cause the impact of the current environment,system status and task uncertain events on mission success in real time.
The article is structured as follows:Section 2 provides an overview of previous related work in SR framework,situation module and reasoning method.Section 3 addresses the SR framework and its procedures.Section 4 proposes a situation module for hierarchical distributed representation of knowledge in SR framework.Section 5 illustrates the key challenges in designing the SR:event detection and event recognition.Section 6 demonstrates the benefits of the proposed SR in a real scenario.This article ends in Section 7 with conclusions and future work.
2|SITUATION REASONING FRAMEWORK
The core components of SRF around three main areas with capabilities are designed corresponding to the analysis of system requirements overviewed in the previous section.Figure 1 is the framework of SR.The flow diagram is introduced for SRF,incorporating the AUV system which is shown in Figure 1.
(1) Event detection considers all uncertain information from environment,task and internal state data of AUV in order to identify and classify uncertain events according to their priority and their nature.Task event detection detects the implementation and progress of the AUV task.Environment event detection perceives the environment related to the assigned mission,including the environmental status,attributes,and dynamics.State event detection deletes the faults of AUV various sensors.
(2) Event recognition is used to receive,process and analyse the uncertain event information coming from event detection.Based on event detection information,event recognition is able to infer the influence degree of the events about the current condition of the vehicle with regard to the availability for completion of the task successfully.
(3) The situation Ontology is used to express the SR of AUV.Situation ontology stores the ontology-based knowledge provided by the a priori expert orientation and the information of events received from the event deletion and event recognition.
SR takes all these event information and the influence degree of the events on the task into account in order to derive a higher level characterisation of the integrated situation.If the integrated situation is good,no assistance is required;if not-good,then new repair is required.A mission planner module generates and adapts mission plans based on the notifications and capabilities reported by the mission executive and situation ontology.The mission executive module is in charge of executing the mission commands in the functional layer based on the actions received from the mission planner.
As input,SR collects data from task module platform's internal state information and external environmental information.As output,SR indicates event type and the influence degree of the events on the task (see Tables 1 and 2).
3|SITUATION ONTOLOGY MODEL
The ontology can achieve a certain degree of knowledge reusing and sharing and improving the interoperability of the system.Ontology is a method for modelling structured knowledge of information systems.The system knowledge of the entire SR system can be described in different levels by a single ontology knowledge representation [17].
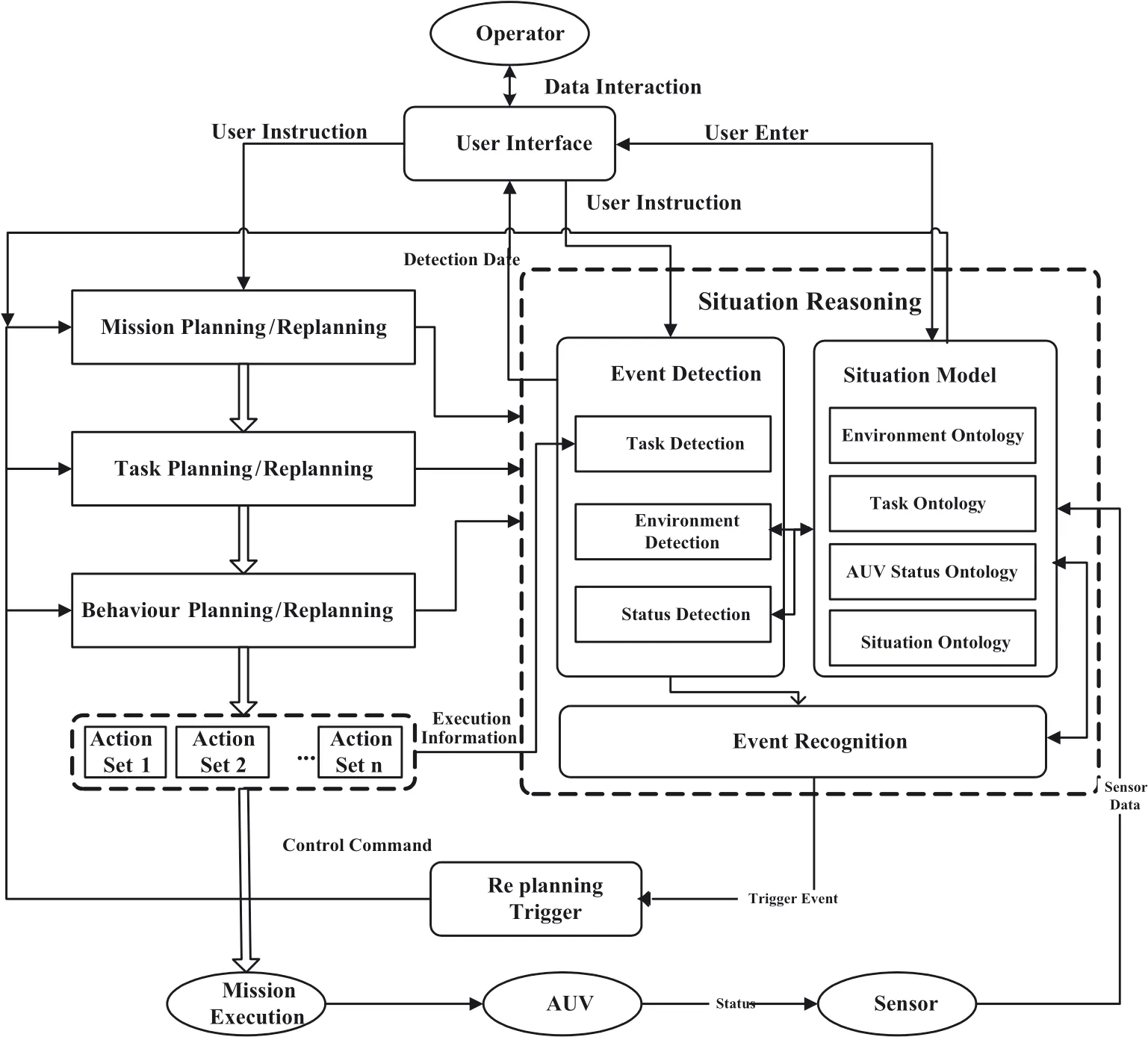
FIGURE 1 Flow diagram for SR framework (SRF),incorporating the autonomous underwater vehicle (AUV) system
3.1|Semantic knowledge framework of application ontology for situation reasoning
This article constructs the semantic knowledge framework of application ontology for SR,as shown in Figure 2.Through the ontology semantic knowledge framework,the information obtained by each sensor of the AUV will stimulate the SR process.The SR stimulates the decision-making and execution module by establishing semantic relations with the AUV,thus achieving reasoning ability similar to human thinking [17,18].
3.2|Semantic knowledge framework of search task ontology for autonomous underwater vehicle
The logical relationship between SR module and decision module of uncertain environment can be expressed by ontology semantic knowledge framework when the AUV is performing the search task.The semantic knowledge framework expresses the SR process in a graphical way.The search task ontology establishes a semantic relationship between the situation information acquisition,event detection,and event recognition module semantics framework through the AUV,as shown in Figure 3 [17,18].
Through this semantic knowledge framework,AUV can respond quickly to uncertain events.For example,the SR module calculates that the occurrence of a random obstacle event has a high degree of influence on the current search task and outputs the uncertainty event and its influence on the task to the decision module.The decision module gives instructions to the execution module after the decision,and the execution module re-adjusts the angle and speed of the AUV after receiving the command [17,18].
3.3|Situation ontology model framework
A SR system,using situation ontology of the AUV system,could automatically suggest the type and the influence degree of the events on the task in relation to the happening of symptoms and alarms in the system.The system may not even have a specific sensor in that event type,and the event may be uncertain.The reasoning interactions with the ontology are provided by the event detection and event recognition(see Figure 4).
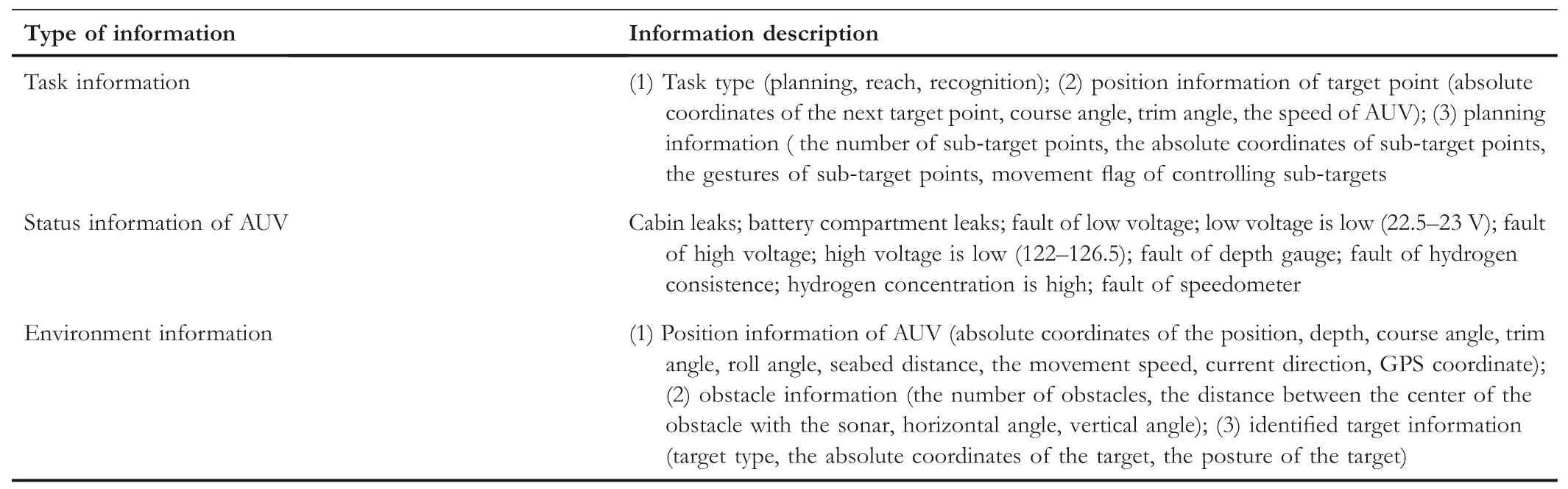
TABLE 1 Input information of situation reasoning
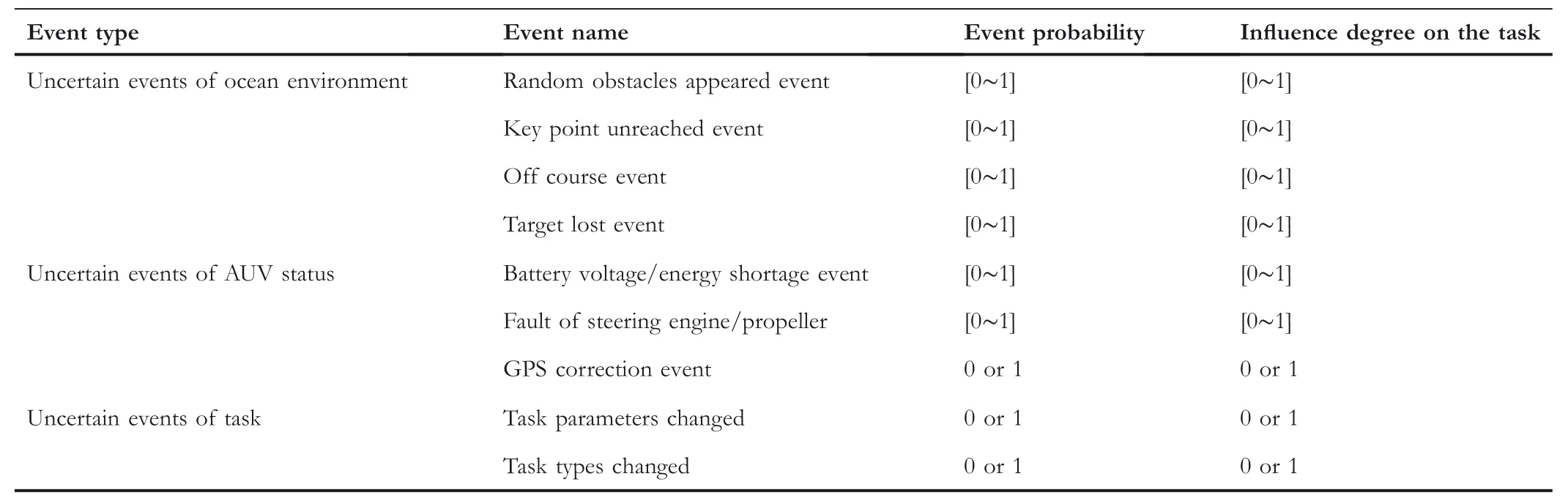
TABLE 2 Output information of situation reasoning
Event detection is an application that enables the domain's logic to be specified with respect to the environment ontology,task execution ontology and robot ontology and executed to the corresponding knowledge,which can detect the type of uncertain event,that is,the instances of the environment ontology.Event recognition uses the instances of the environment ontology,task execution ontology and robot ontology to reason the influence degree of the events on the task with Bayesian Network in uncertainty reasoning.The output is stored in situation ontology which is used to trigger the task repair process.
In the work described,ontologies are defined in ontology web language (OWL) [19].OWL is extended with probability information,making it support uncertainty presentation.According to AUV domain knowledge,situation ontology is built in Protégé.In this work,the representation of uncertain event of AUV domain concepts is based on a system observation design pattern.
Ontology cannot express the overlap or the degree of intersection,and cannot support uncertainty reasoning.Semantic web rule language (SWRL) is used to reason whether the uncertain event has happened roughly,which is the triggering condition of uncertainty reasoning of the event recognition [20].
4|REASONING METHOD
Based on the analysis of the four characteristics of the above USV situational cognition,it can be concluded that due to the fact that the uncertain factors of environment,state,task and user together determine the USV situation,and the certainties of these factors are different;an uncertainty reasoning method similar to humans is used to implement the USV situational reasoning process.
FIGURE 2 Semantic knowledge framework of application ontology for situation reasoning
Bayesian networks have similar inference and diagnostic processes as humans,and joint probability distributions can be used to describe the relationships between random variables.In the theory of uncertainty information processing,the Bayesian network has the strongest mathematical foundation.Bayesian networks have many advantages in many uncertain inference methods:(1) information between Bayesian network nodes can be propagated through directed edges,and nodes and directed edges represent domain knowledge.You can gain knowledge of Bayesian networks through expert experience and sample learning.The Bayesian networks' reasoning mechanism is in line with the understanding of the relevant domain knowledge of the USV situational awareness;(2) Bayesian networks can obtain new knowledge through automatic updation;(3) the field knowledge has been encoded when Bayesian networks first establish.Knowledge is encoded when Bayesian network can update knowledge in both initialisation and follow-up learning;(4) The USV's recognition of the current situation is achieved through the cumulative effect of new evidence and arrival of evidence over time series.The information propagation in the Bayesian network can reflect the continuity of the USV situational cognition.Other uncertain inference algorithms without memory have no temporal continuity of the Bayesian network;(5) Bayesian network is the combination of Bayeux scientism and graph theory and it has a solid theoretical foundation.Therefore,Bayesian network technology is used to realise the uncertain reasoning of situational cognition process.
In addition,the fuzzy logic theory can deal with uncertain semantic information,which is a mathematical method that can deal with human cognitive uncertainty,because the uncertain events in the cognition process of USV have multiple uncertain states;it is feasible and reasonable to use the fuzzy logic theory to reason the uncertainty in the cognition process.The first stage of USV situational awareness is the identification of environmental events.Since the boundary between uncertain environmental event states is not very clear,in order to obtain the quantitative recognition result of the uncertain event,it is necessary to blur the specific value of the static of the uncertain event.For example,the state of the obstacleintensive event is fuzzified,and the probability value of the obstacle-intensive event can be determined.Different parameter models should be chosen for the membership function of different uncertain events.After the fuzzy logic quantised environmental event recognition results are input into the corresponding nodes of the Bayesian network for uncertain reasoning,a situational reasoning process is completed.Therefore,it is feasible and reasonable to use the combination of Bayesian network and fuzzy logic to realise the USV situational reasoning process.
4.1|Event detection
Event detection uses a fuzzy logic processor and an event rule base to transform event state (0 or 1),which is reasoned by SRML into probability variable;this probability variable represents the possibility of uncertain event.The output of event detection is stored in situation ontology by probability description,which is the triggering condition of event recognition.Uncertain events are on shown as leaf nodes of Bayesian network in Figure 5.
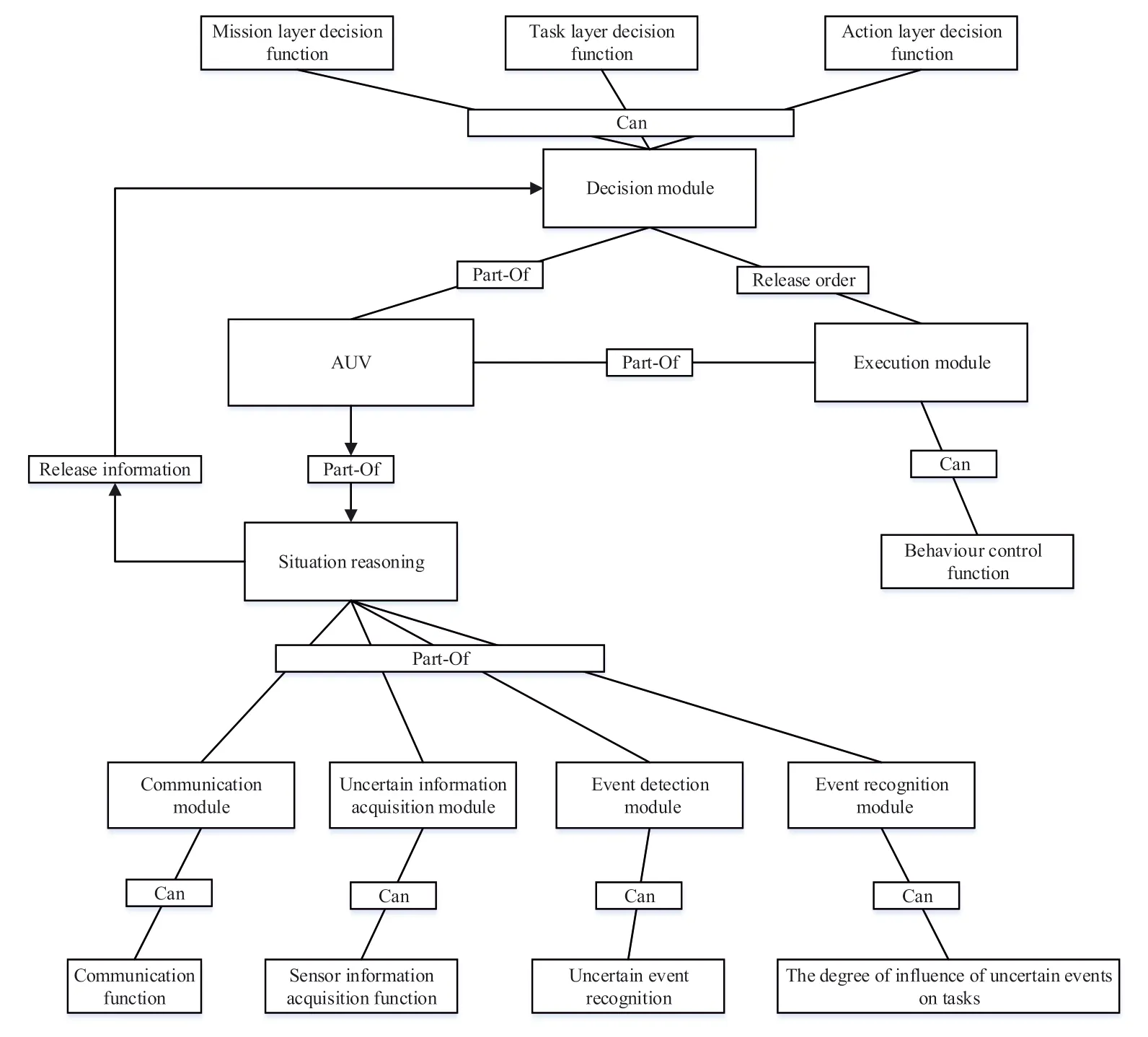
FIGURE 3 Semantic knowledge framework of search task ontology for autonomous underwater vehicle
4.2|Event recognition
Event recognition needs to infer the influence degree of the events on task according to uncertain information.The normal situation ontological model is not able to express the AUV domain specific uncertainty or risks.To overcome this shortcoming,an ontology-driven uncertainty situation module is quoted namely,the OntoBayes model [21].This module uses extended OWL to integrate the Bayesian approach into ontology and preserves the advantages of both;ontology has power of knowledge presenting and Bayesian network provides ability of reasoning.Thus,the uncertainty representation and reasoning capabilities of the ontology are expanded,and the ontology is widely used.
4.2.1|The frame of ontology-based Generation of Bayesian Networks
Based on existing situation domain ontology extended OWL with probability description,a method for the ontology-based generation of Bayesian networks is proposed.The ontology is used to provide the necessary knowledge about relevant influence factors,their relationships,their weights,and the scale that represents potential states of the identified influence factors.The developed method enables based on the existing ontology,situation domain ontology extended OWL with probability description,the semiautomatic generation,and alternation of Bayesian networks (see Figure 6).
4.2.2|The steps of ontology-based generation of Bayesian networks
In the following,the ontology-based generation of Bayesian networks is described using the situation ontology extended OWL with probability description,which provides the foundation for enriching the Bayesian network with concrete knowledge.The main phases of the proposed method are:
-Concepts ->nodes.Those ontology concepts,which are relevant to the considered problem and should be represented in the Bayesian calculation schema are selected to establish the nodes of the Bayesian network.
-Relations ->links.Ontology relations starting and ending between the selected concepts are used to establish the links between the Bayesian network nodes.
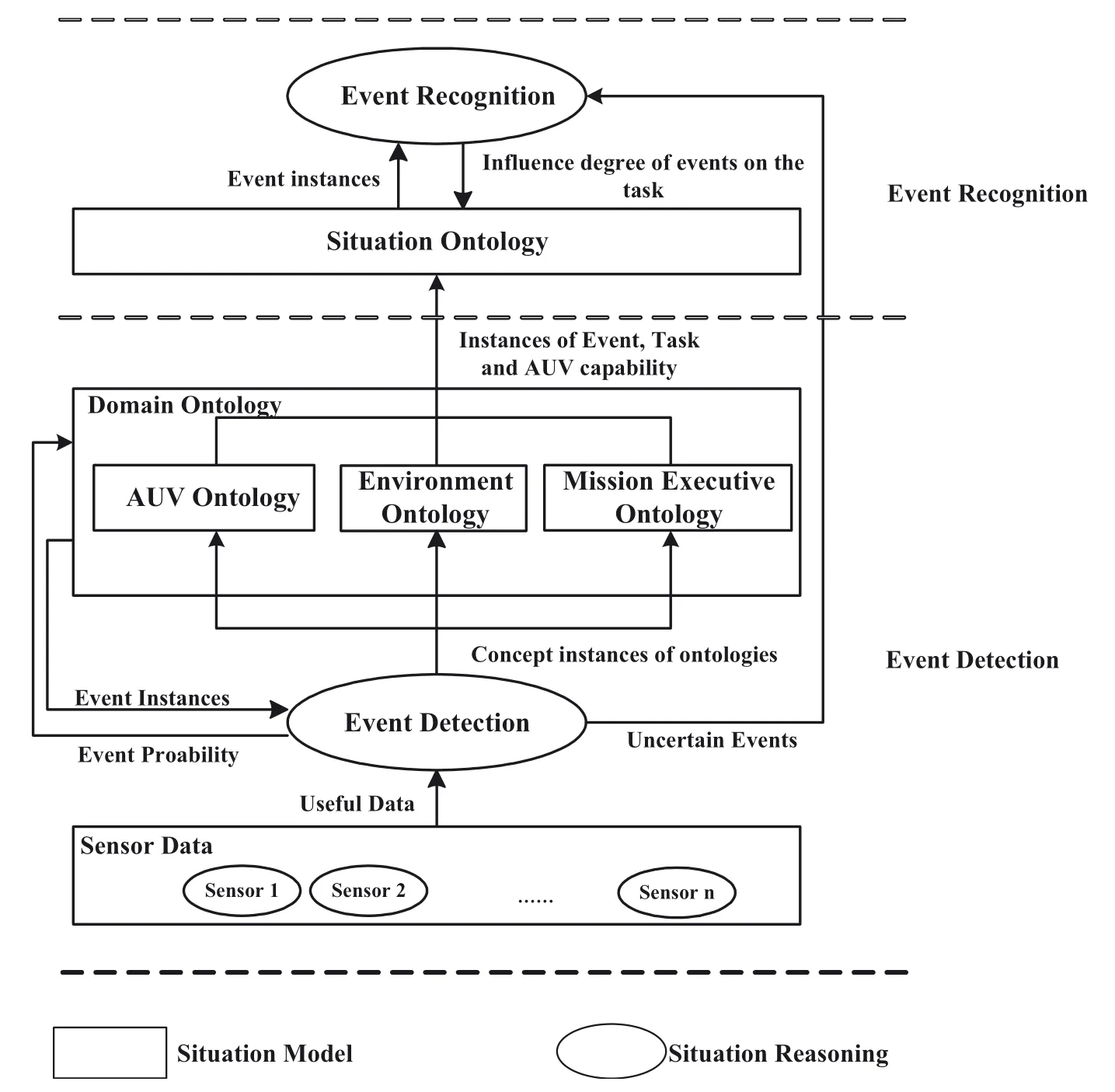
FIGURE 4 Situation ontology model framework
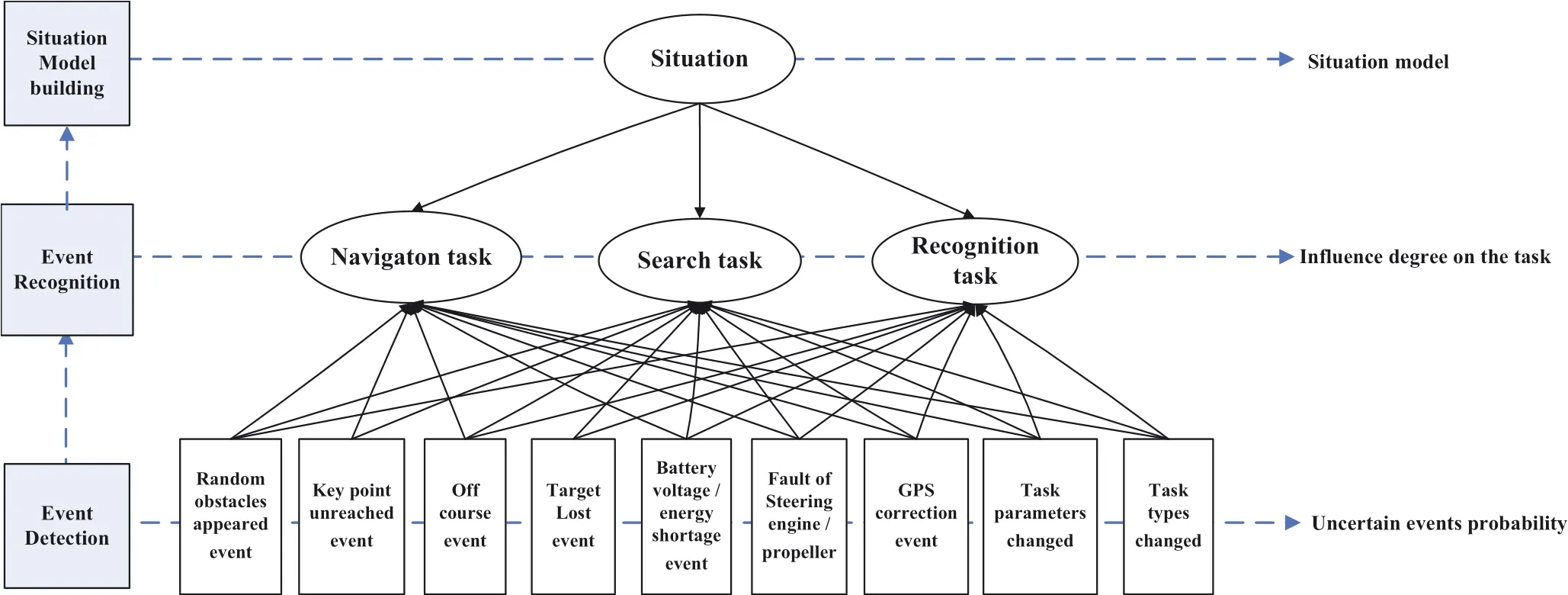
FIGURE 5 Bayesian network of the situation reasoning
-Axioms ->node scales and weights.Scale-and weightrelevant axioms are used to determine potential states and weights of the Bayesian network nodes.
-Instances ->findings.Instances of concepts,which are represented by the Bayesian network's leaf nodes,are used to derive and enter concrete findings in the Bayesian network.
4.2.3|Event recognition method-based Bayesian network
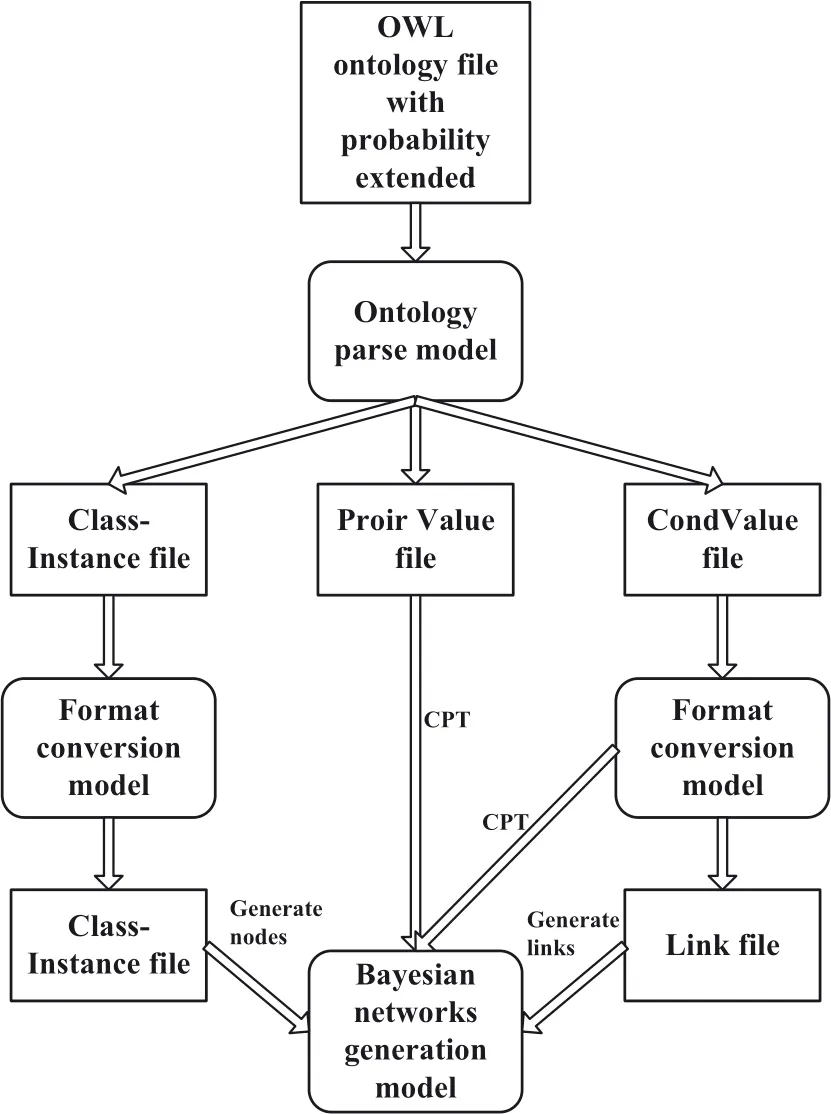
FIGURE 6 Ontology-based generation of Bayesian networks
Bayesian network of the SR is shown in the Figure 3.After setting up the nodes,node links,and node scales,the conditional probability table (CPT) for each node must be calculated to finalise the Bayesian network structure.The previous phases have created a Bayesian network including relevant nodes,node links,node scales,and node weights supporting the CPT calculation.The current phase exploits the ontological knowledge base to provide concrete findings to the Bayesian network.One can reason all the situation information of AUV,which is provided to mission planner.
5|TEST CASE SCENARIO
In this scenario,AUV supports and provides solutions for navigation tasks [22,23].The operation involves high levels of uncertainty and risks of random obstacle appeared event,off course event and key point unreached event in the vehicle.Situation reason module can detect the types of events and recognise the influence degree of the events on the task,if a vehicle is damaged or some uncertain events happened,SR will update the situation module to trigger mission repair.The performance of the system has been evaluated on an AUV platform.A PC/104 payload running Linux has been installed in the vehicle.The performance of the system has been evaluated on an AUV integrated simulation system,with SGI OCTANE2 workstation at the core,which is shown in Figure 7.
AUV's navigation in an uncertain underwater environment is shown in Figure 8.There is no uncertain event which happened at this moment,so there is no OWL ontology instance in the knowledge base of the situation module.
5.1|Off course event
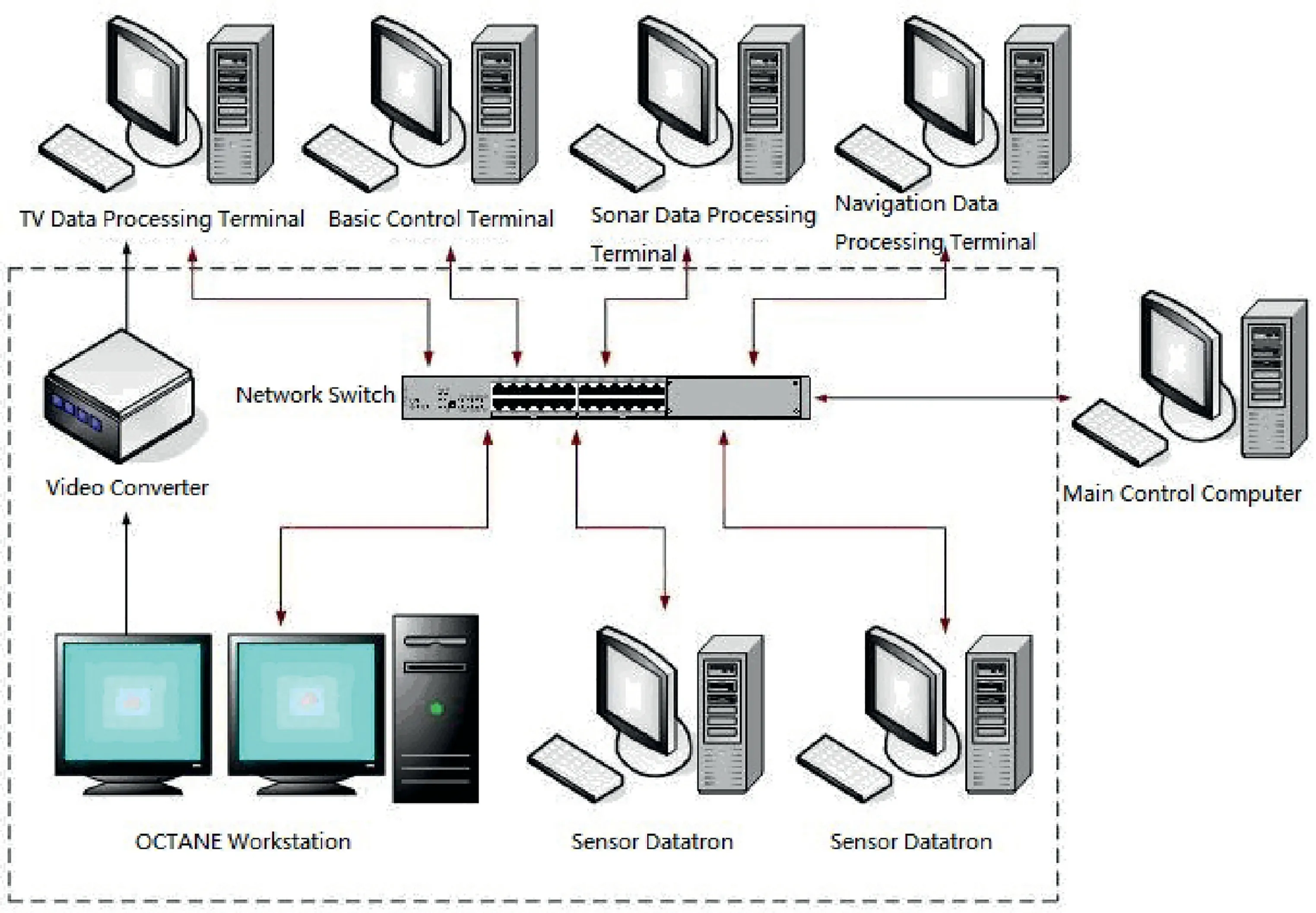
FIGURE 7 Integrated simulation system for autonomous underwater vehicle
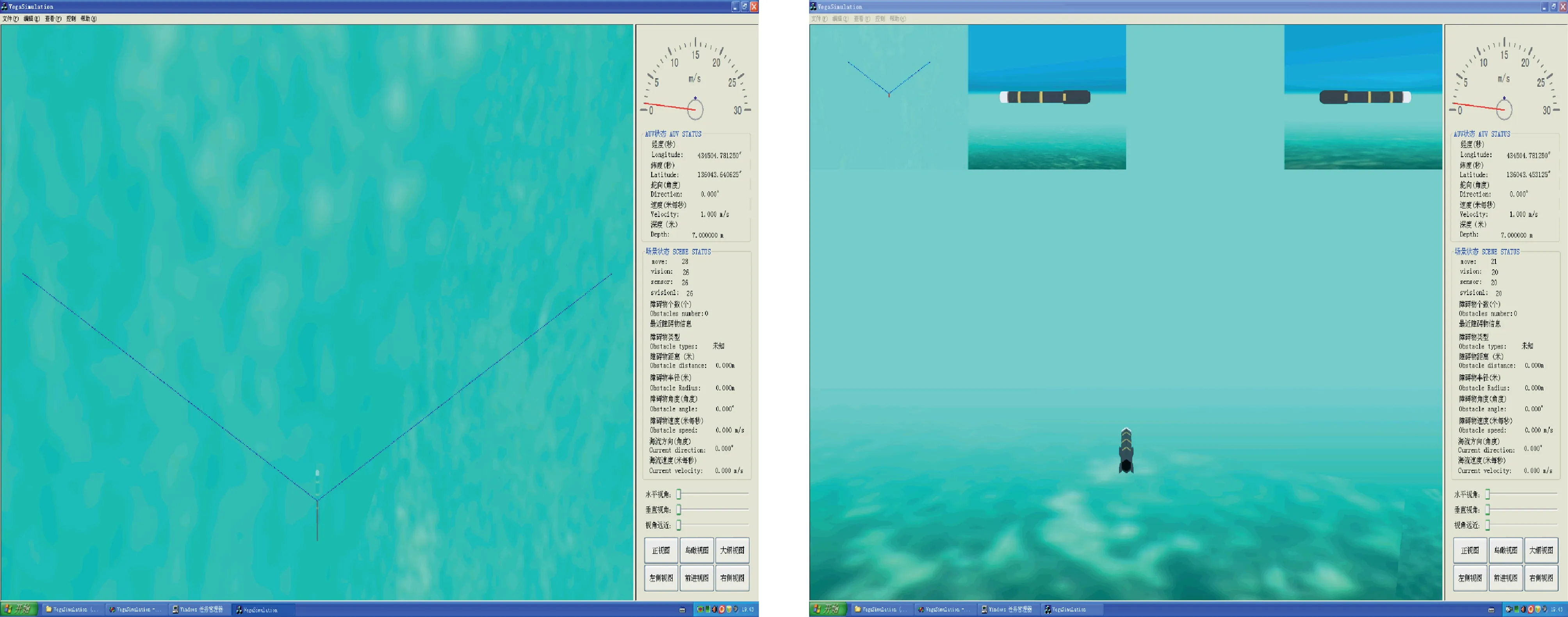
FIGURE 8 Autonomous underwater vehicle navigation in underwater environment
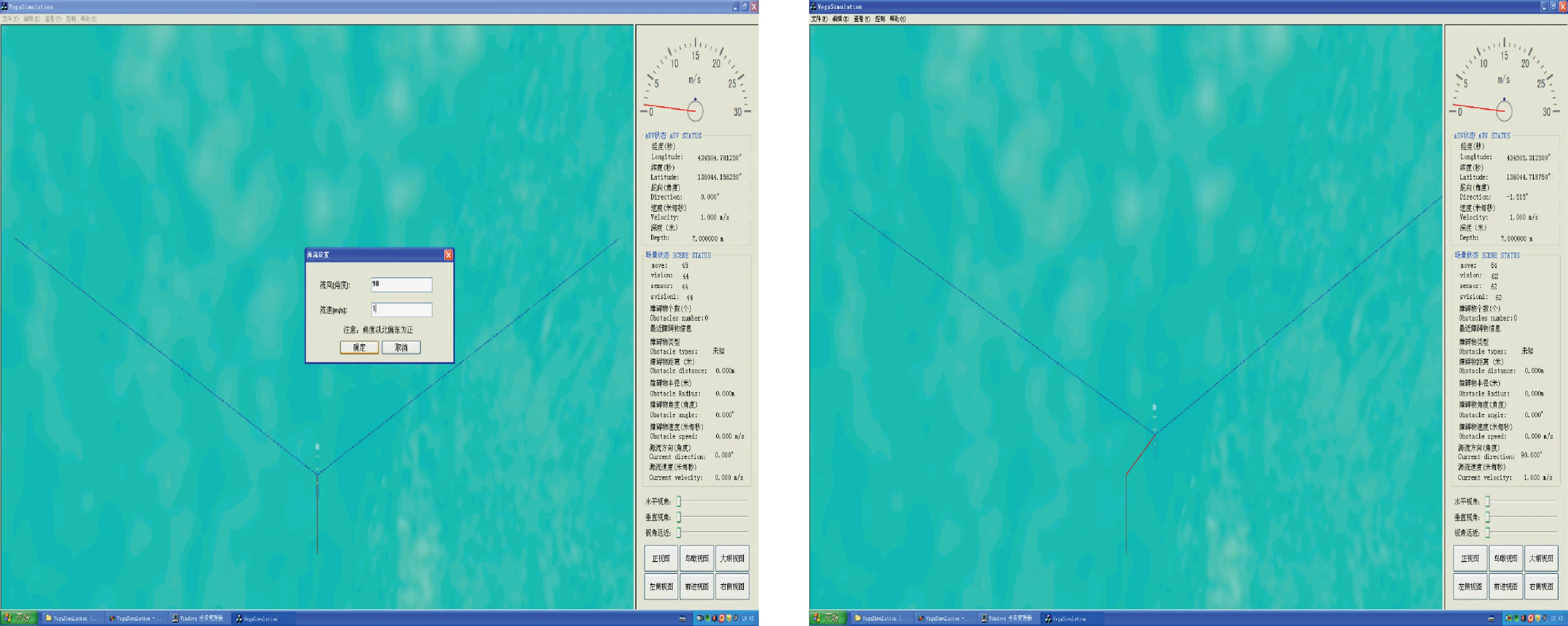
FIGURE 9 Off course event triggers situation reasoning
Off course event represents that AUV deviates from the predetermined route and farther away due to the influence of currents and manipulation factors when AUV is not avoiding the obstacles.Initially,AUV was navigating to the target point at a speed of 1 m/s,off course event happens after the current at a speed of 3 m/s in the direction of 90°was added.Off course event occurred during the navigation mission as shown in Figure 9.Its situation results correspond to Table 3.
The results of SR show that the AUV is off course at 56 s,the probability of off course event happened is 0.15,and the influence degree of the off course event on the task is 0.153.According to this information,the situation ontology model generates the instance of the off course event.As time goes on,the probability of the off course event which happened increases,and the influence degree of the off-course event on the task also grows.At 64 s,the influence degree of the off-course event on the task is 0.624,which is more than the threshold of 0.6 triggering repair.After mission repair adjusted the angle and speed information of AUV,the probability of off course event happened decreases gradually,the influence degree of the off-course event on the task also reduces to zero gradually.The corresponding OWL format file is shown in Figure 10.
In Figure 10,DeviationOfShipRoute_10 represents the 10th instance of off course event;MediumLevel_10 represents that threat level of off course event is medium,0.600 is the probability of off course event happened,and Situation_1 represents the influence degree of the off course event on the task,which is 0.624.
5.2|Random obstacles appeared event
Random obstacles appeared event represents the distances of obstacles which is less than the safe distance,that can damage the AUV.Initially,AUV was navigating to the target point at aspeed of 1 m/s,and random obstacles appeared event happens after the static obstacle with a 50-m radius was added on the course of AUV.As AUV is getting closer to obstacles,the probability of random obstacles appeared event happening is growing.Random obstacles appeared event occurred during the navigation mission as shown in Figure 11.Its situation results correspond to Table 4.
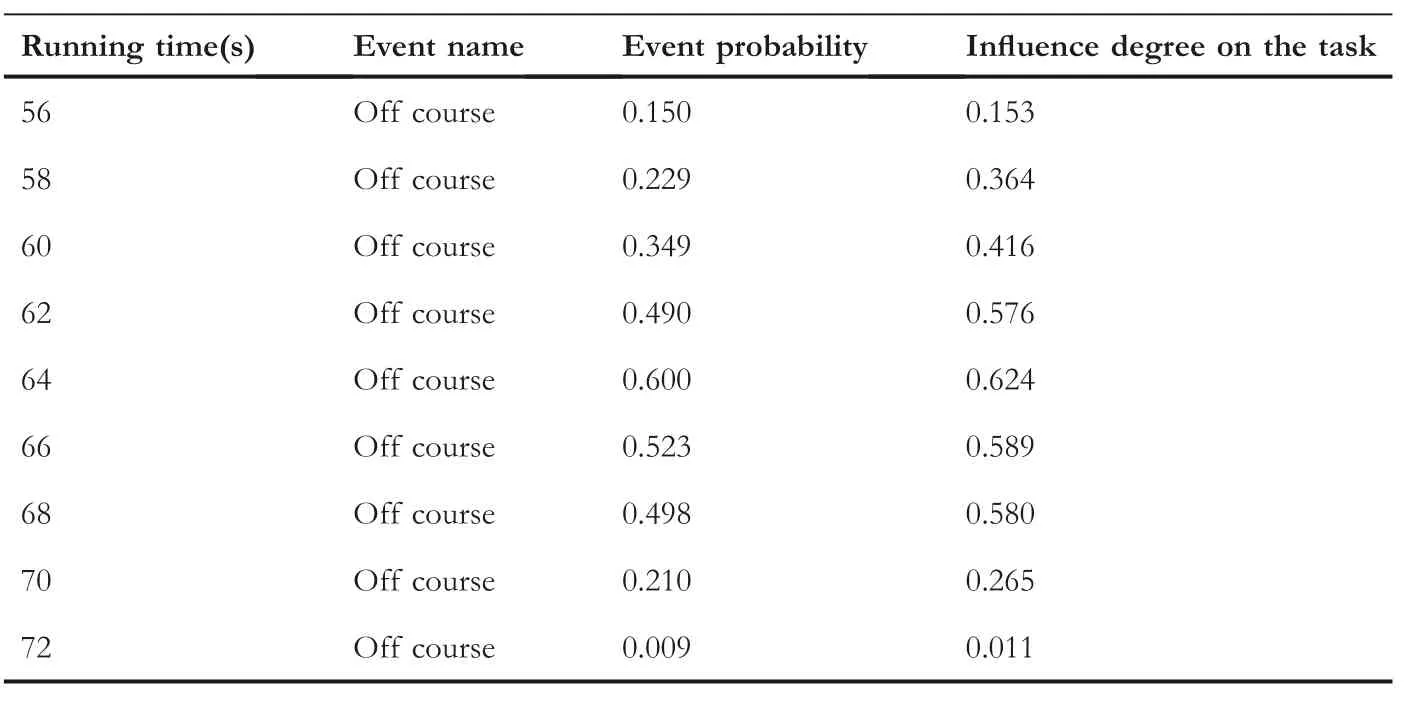
TABLE 3 Situation results of Figure 7
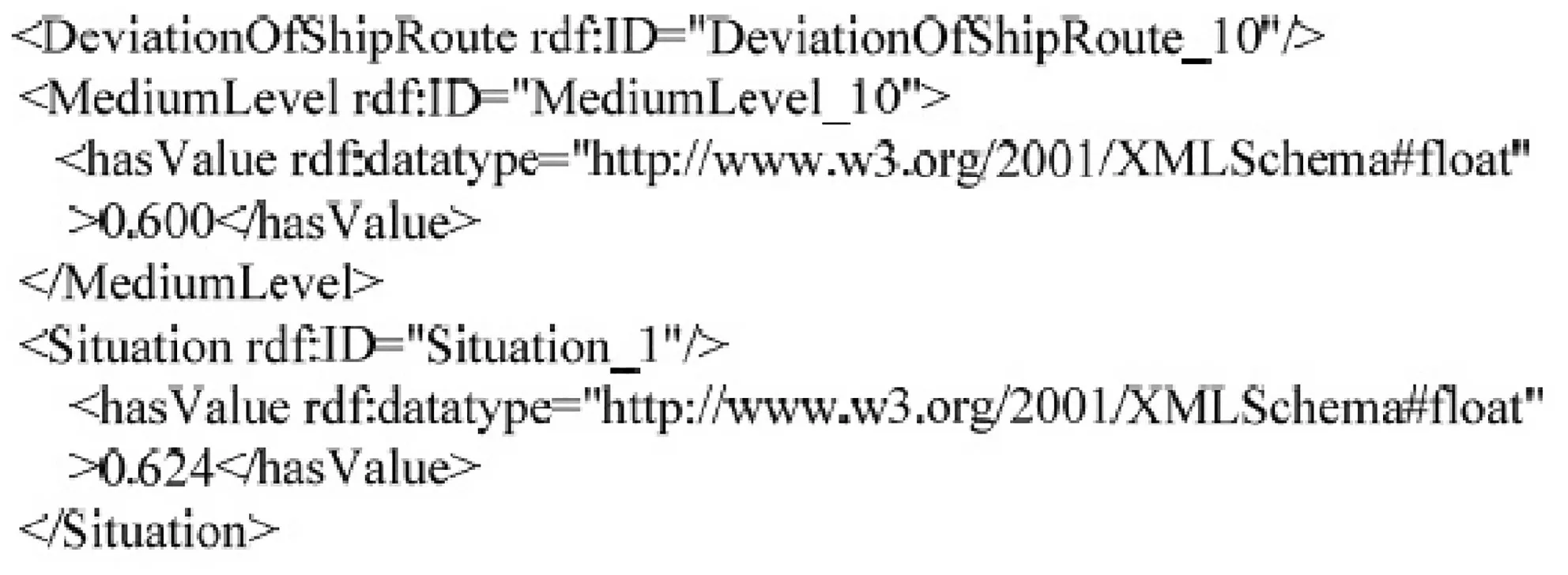
FIGURE 10 Ontology web language (OWL) format file
The results of SR show that since the obstacle added is too close to AUV,it needs to avoid obstacles timely.Random obstacles appeared event happened at 90 s;the probability of random obstacles appeared event happened is 0.764,the influence degree of the random obstacles appeared event on the task is 0.612,which is more than threshold the 0.6 of triggering repair.After avoidance,obstacle program repair adjusted the angle and speed information of AUV;the probability of random obstacles appeared event happened and the influence degree of the random obstacles appeared event on the task are reducing to zero gradually.The corresponding OWL format file is shown in Figure 12.
In Figure 12,RandomObstacle_2 represents the second instance of random obstacles appeared event.HighLevel_2 represents that threat level of random obstacles appeared event is high,0.835 is the probability of random obstacles appeared event happened,and Situation_2 represents the influence degree of the random obstacles appeared event on the task,which is 0.798.
5.3|Key point unreached event and random obstacles appeared event
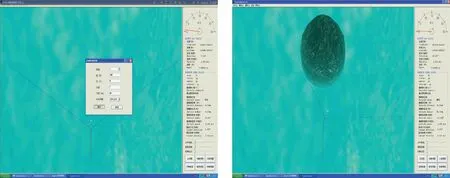
FIGURE 11 Random obstacles appeared event triggers situation reasoning
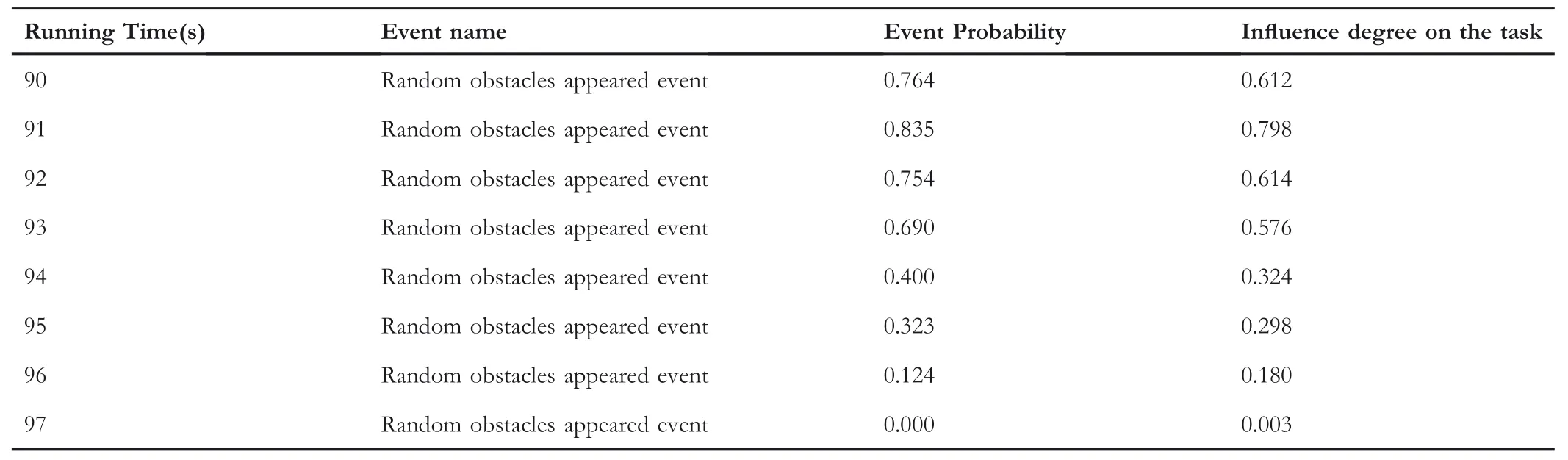
TABLE 4 Situation results of Figure 11
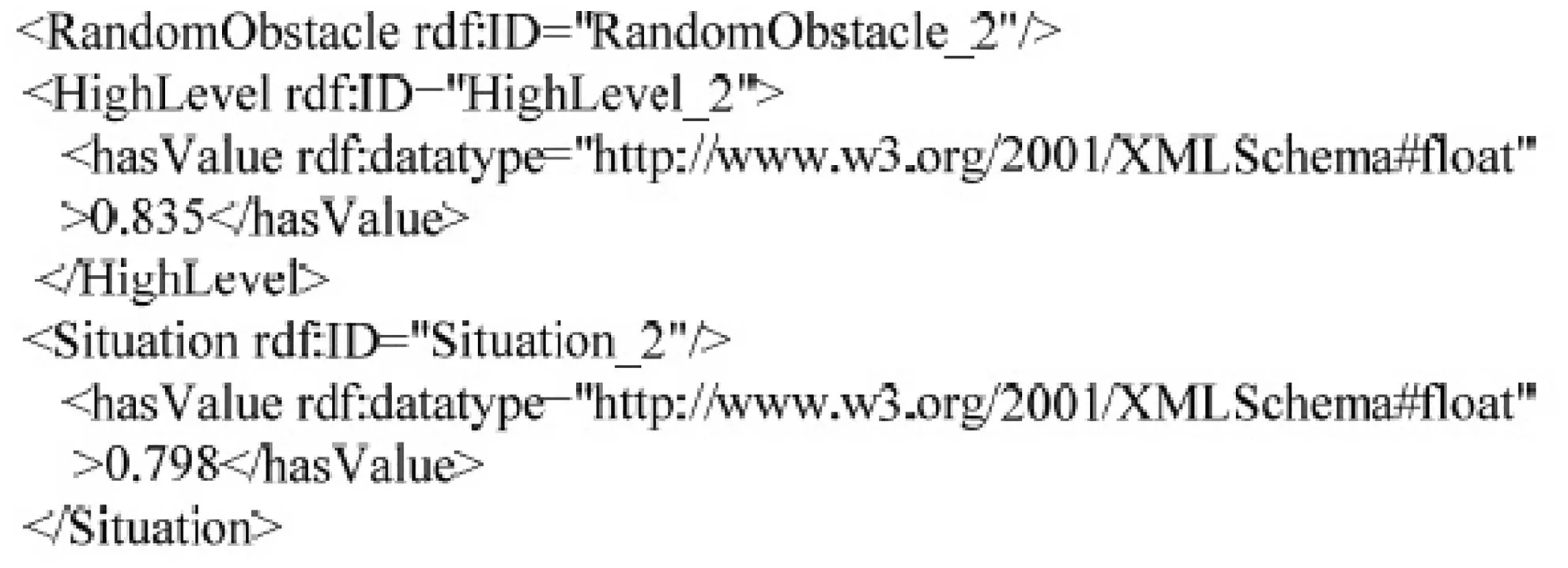
FIGURE 12 Ontology web language format file
Key point unreached event represents that AUV is difficult to reach the target point due to the target point of AUV which is surrounded by obstacles,or invalid planning actions.Key point unreached event concurred after three static obstacles were added.Key point unreached event concurred during the navigation mission as shown in Figure 13.Its situation results correspond to Table 5.
Three obstacles were added at 407 s,the probability of key point unreached event trigger SR happened is 0.106,and the influence degree of the random obstacles appeared event on the task is 0.024.At 417 s,the probability of the key point unreached event happened is 0.728,and the influence degree of key point unreached event on the task is 0.688,which is more than the 0.6 threshold of triggering repair.After the avoidance obstacle program repair adjusted the angle and speed information of AUV,the probability and the influence degree of key point unreached event trigger SR are reducing to zero at 421 s.The corresponding OWL format file is shown in Figure 14.
In Figure 14,KeypointUnreach_1 represents the instance of key point unreached event trigger SR.High Level _1 represents that threat level of key point unreached event is high,0.728 is the probability of key point unreached event happened,and Situation_3 represents the influence degree of the random obstacles appeared event on the task,which is 0.688.
The experiment result shows that one can gain more information from SR and can provide useful information for our mission repair.The demonstration shows the benefits of using an ontological representation to describe the SR,and how the event detection and recognition are capable of interchanging knowledge in order to dynamically adapt the mission to the changes occurring in the platform and the environment.
5.4|Target lost event
The target lost event means that the AUV finds suspicious targets in the search area;when the AUV is close to the target,the target gradually disappears in the field of vision.Figure 15 shows hexagonal pipe tracking of AUV.
AUV is affected by uncertain marine environment and AUV's own state during the tracking process,when AUV traces the corners of the hexagonal pipe,and the pipe deviates from the middle of the AUV view field to the outside of the AUV view field.The pipeline in the AUV view is missing,and the target lost event occurs,as shown in Figure 16.The SR results are shown in Table 6.

FIGURE 13 Key point unreached event trigger situation reasoning
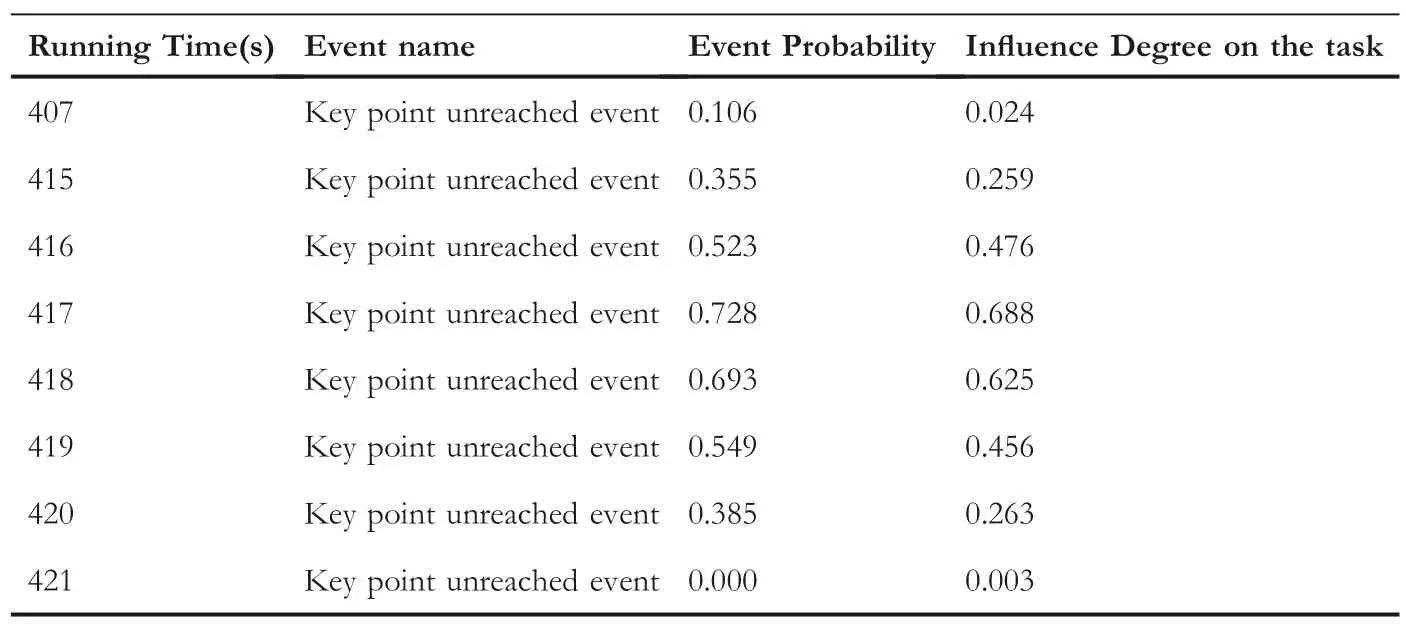
TABLE 5 Situation results of Figure 13
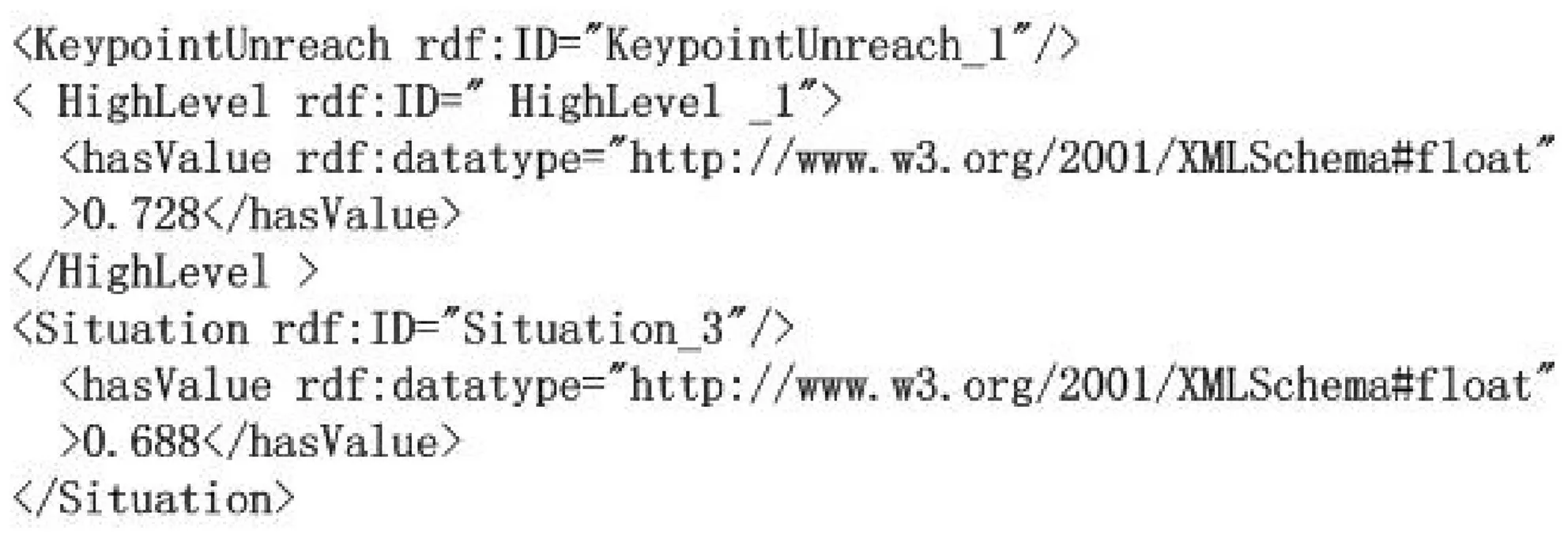
FIGURE 14 Antology web language format file
According to the analysis of the results of AUV SR,one can see that when the system runs to the 91 s,AUV is tracking the corner of hexagonal pipeline.The pipeline is deviated from the center of the AUV view field to the outside of the AUV view field,which leads to the loss trend of the pipeline in the AUV view field.Currently,the impact of the target lost event on the task is 0.632 and it is on the rise.The decision module of AUV is triggered,and it is judged that the mission layer,the task layer,or the behaviour layer should be planned and repaired according to the decision-making rules [24,25].After making the decision,the AUV re-adjusted the direction or speed until 101 s,and the impact of the target lost event on the mission was reduced to zero.AUV will resume normal tracking after planning and repairing,as shown in Figure 17.
5.5|The result comparative analysis of the sea test
The accuracy of sensor information,the motion control of AUV,and the distribution of obstructed objects in real marine environments are more complex than those of simulations.In order to further verify the performance of the SR approach based on the ontology and Bayesian network on the real AUV,a series of sea test was conducted in a sea area.In order to obtain a clear experiment result,one navigation experiment data was extracted from the total experimental data,The target guidance points were A(135,206.48,439,885.66),B (135,206.48,439,872.85),C(135,182.85,439,872.48),D (135,183.1,439,898.59),E(135,206.48,439,898.83),and F (135,205.6,439,884.91),the experiment time is 1896 s,and 1896 tick counts were planned.

FIGURE 15 Hexagonal pipe tracking of autonomous underwater vehicle (AUV)
FIGURE 16 Target lost event of autonomous underwater vehicle (AUV) navigation
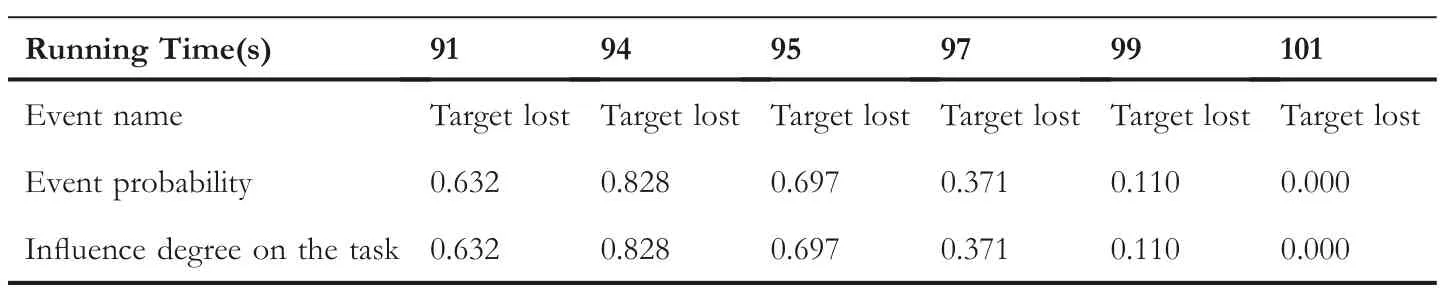
TABLE 6 Output information of situation reason
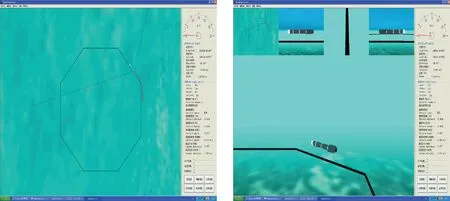
FIGURE 17 Autonomous underwater vehicle navigation safely after replanning
If there is no SR result to trigger AUV replanning in 24,493 s,the AUV has been far away from F point and cannot follow the points A→B→C→D→E→F to complete the mission.AUV trajectory is shown in Figure 18a.
Its tick count is between 23,103 and 24,999 s,and AUV's blue planning path is shown in Figure 18b.The pink point on the avoidance path is the trajectory of the AUV when the key point unreachable event occurs,and the red upper triangle represents the target guide point,where the horizontal axis is longitude,and the vertical axis is latitude.The results of SR are shown in Table 7.
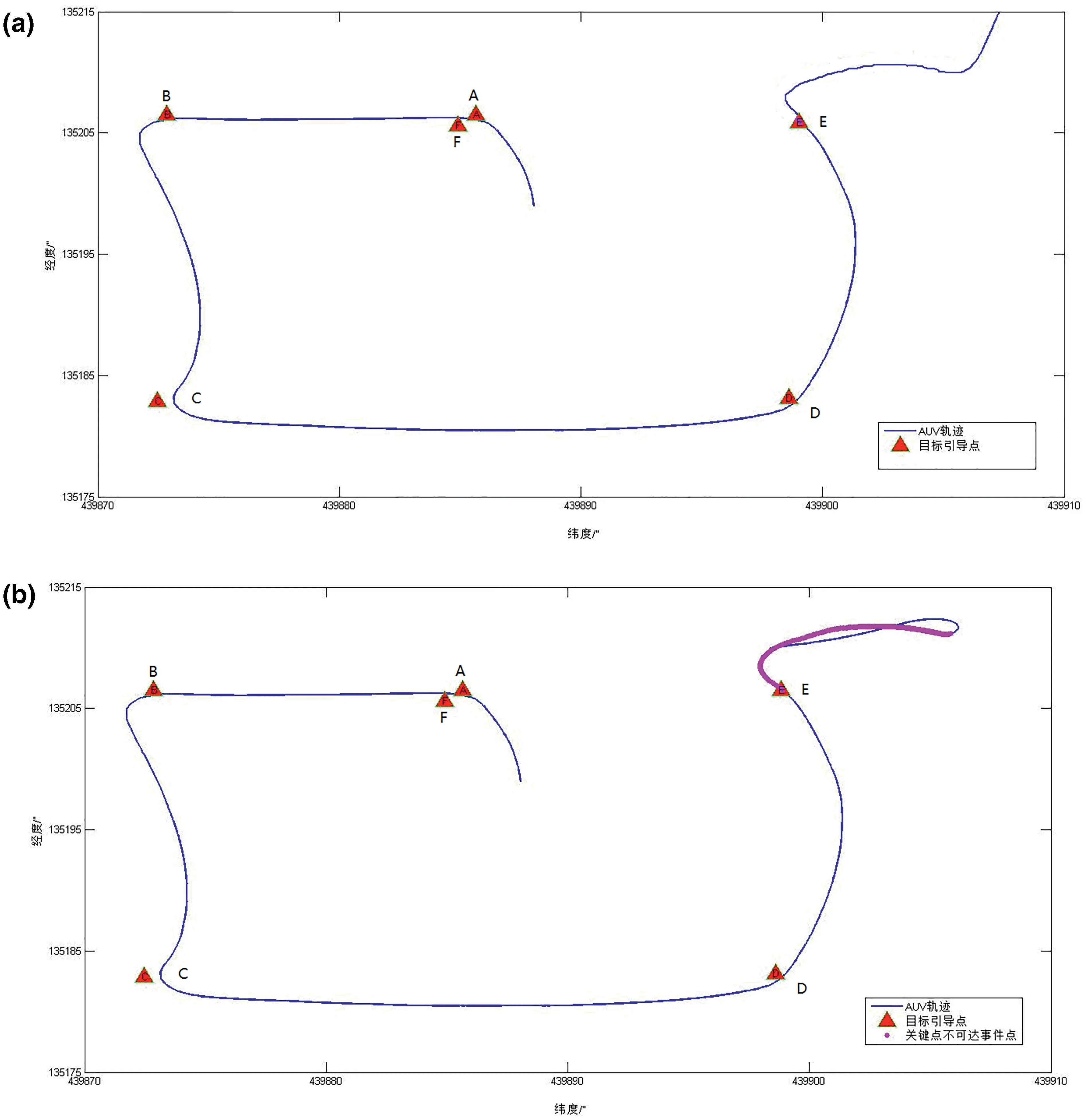
FIGURE 18 Comparison of experimental results.(a) autonomous underwater vehicle (AUV) trajectory when replanning module is not triggered by situation reasoning module (b) (AUV) trajectory when replanning module is triggered by situation reasoning module
As shown in Figure 18b,under the guidance of the target point,the AUV should follow the points A→B→C→D→E→F to complete the mission,but after the AUV sailed to point E,it did not follow the guidance point to drive to point (f).The key point unreachable event occurred between 24,440 s and 24,493 s.The impact of key point unreachable events on the current navigation mission increased from 0.023,411 to 1.Between 24,465 s and 24,492 s,the impact of key point unreachable events on the current navigation task has been consistently 1.At 24,493 s,the AUV adjusts the heading angle and speed,and AUV moves towards the target F again.The key point unreachable event ends.The effectiveness of the AUV SR method was verified by this sea trial.
The probability of uncertain events and its impact on tasks are basically the same similar to the experienced AUV operators.Furthermore,through the off-line analysis of real sea test data,it is proved that the AUV SR method can also recognise the relative accuracy of the uncertain events and their impact on the task during the real sea test.Even if there may be misjudgement,there are only two cases.One is that the probability of an uncertain event is too low to trigger the decision system and can be ignored.The other isthat the time of occurrence of an uncertain event lasts only a few tick counts (a few seconds),which is far less than the communication time of the AUV.The real SR is a cumulative process,and the influence of the uncertain events over the second is negligible.This method is verified by real sea test data.The AUV SR method based on ontology and Bayesian network can recognise the influence degree of uncertain events on the task in real marine environment,so this method can effectively adapt to the basic control and motion characteristics of AUV.
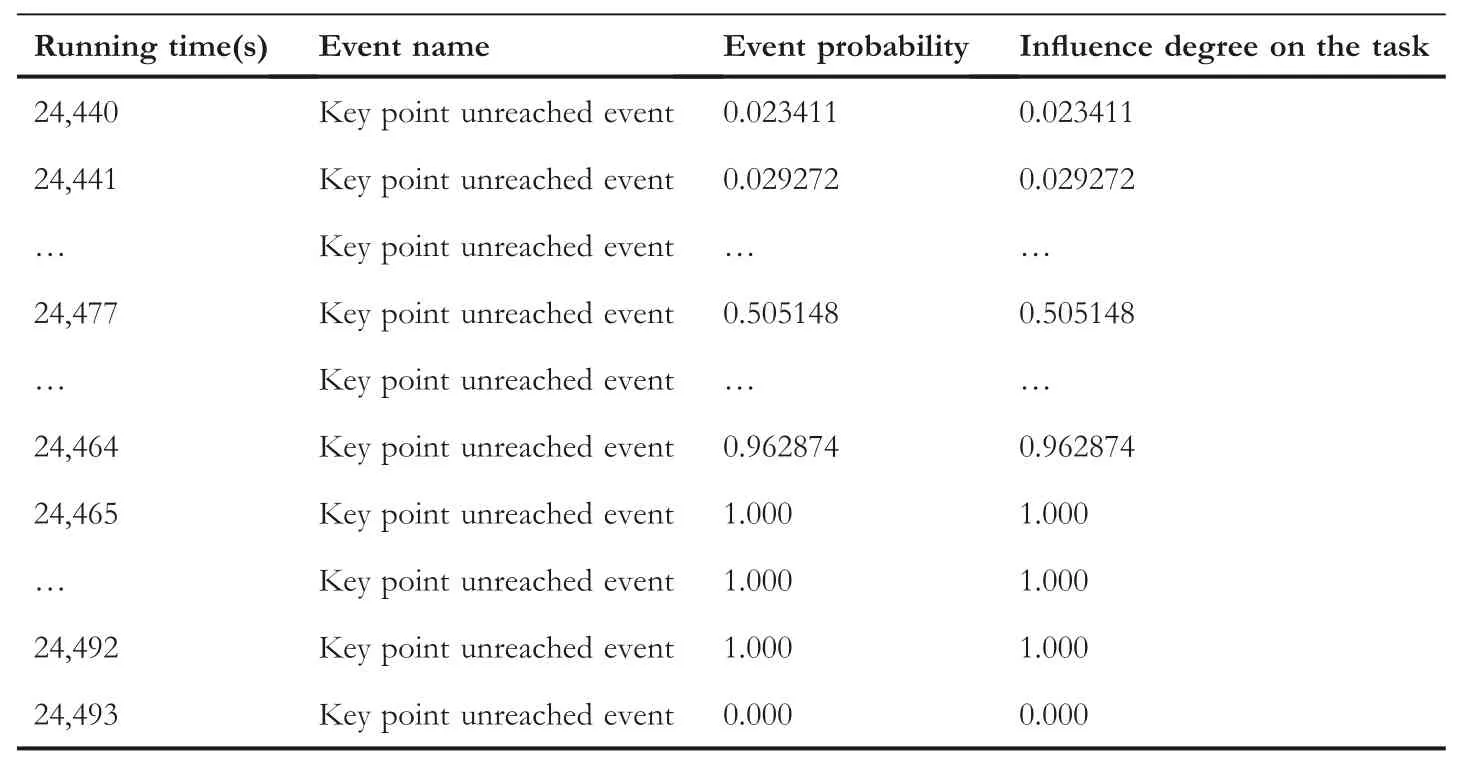
TABLE 7 Output information of situation reason
6|CONCLUSIONS
In order to solve the following two problems,(1) the current research on AUV SR are still limited to the observation or perception level of SR.Only the uncertain events produced by the actuators and sensors of AUV can be perceived.There is almost no perception of environmental and mission uncertain events,and it is cannot judge the degree of situational threat of the current integrated environment according to the impact of uncertain events on the AUV task.(2) It is necessary to use a single form of knowledge representation to express the whole SR system,so that the decision-making module can dynamically extract different levels and types of SR results in each stage.In this way,situation ontology model has natural hierarchy,structure and inclusiveness,which can reflect the sharing and reusing of knowledge and the interoperability of the system [17].
Therefore,this article presents the SR approach for AUV,which includes uncertain event detection,uncertain event recognition and situation ontology model.In the process of simulation experiment and sea test,the validity of the SR method is tested by changing many complex task types (navigation,search and tracking tasks).The conclusions are as follows:On the one hand,the AUV SR method based on ontology and Bayesian network is effective.It can recognise the impact of environment,state and task uncertain events on the task.On the other hand,the decision module can be triggered by the SR module.Reasoning results of different levels and different types of uncertain environments are used to determine the level of planning and repairing (behaviour layer,task layer or mission layer).The hierarchical planning and repair method is an effective way to improve the performance of the system.
Also,future work will use compact interactive memetic algorithm (CIMA)-based collaborative ontology matching technology [18] to build situation ontology for improving the efficiency of the AUV system,and being better applicable to land,sea and air unmanned system.
ACKNOWLEDGEMENTS
The project was supported by the National Natural Science Foundation of China (No.61,673,084),the Fundamental Research Foundation for Universities of Heilongjiang Province(No.LGYC2018JC017),and the Natural Science Foundation of Jilin Province (No.F2016020).
 CAAI Transactions on Intelligence Technology2021年2期
CAAI Transactions on Intelligence Technology2021年2期
- CAAI Transactions on Intelligence Technology的其它文章
- Selective kernel networks for weakly supervised relation extraction
- Binaural sound source localization based on weighted template matching
- Learning-based control for discrete-time constrained nonzero-sum games
- Flow-assisted visual tracking using event cameras
- Protecting artificial intelligence IPs:a survey of watermarking and fingerprinting for machine learning
- Why AI still doesn’t have consciousness?