
拋物線型旋轉(zhuǎn)軌道上珠子的運動問題
2022-11-07 00:50曹煜軒姜建剛
物理通報 2022年11期
曹煜軒 姜建剛
(西北農(nóng)林科技大學(xué)理學(xué)院 陜西 咸陽 712100)
旋轉(zhuǎn)圓環(huán)上的珠子是一道有趣的力學(xué)問題.描述了一個珠子在圓形繞軸旋轉(zhuǎn)的軌道內(nèi)運動的問題.因其具有豐富的動力學(xué)性質(zhì),已有很多學(xué)者對這一問題展開過研究[1~3].然而,本文通過理論分析發(fā)現(xiàn),拋物線型軌道上的珠子這一問題仍具有十分有趣的動力學(xué)性質(zhì).同時,本文通過數(shù)值模擬[4~6],更加直觀地闡明了珠子的運動現(xiàn)象.理清這一問題背后的原理,十分有助于學(xué)生對動力學(xué)與微分方程的融會貫通.
1 珠子的動力學(xué)方程
一個質(zhì)量為m的珠子,放置在拋物線型的光滑軌道中,軌道繞y軸以角速度ω旋轉(zhuǎn),如圖1所示.
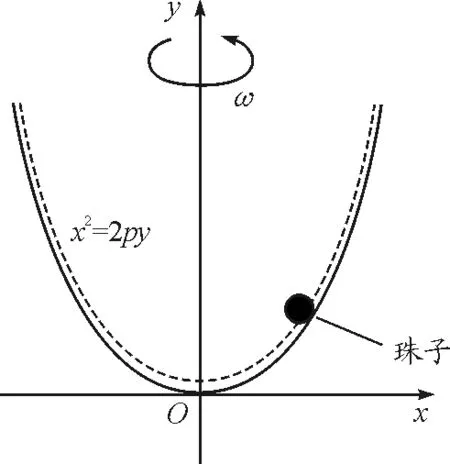
圖1 拋物線上的珠子示意圖
珠子的位置可由坐標(x,y)確定.因為珠子在拋物線軌道中運動,存在約束x2=2py(p>0),其中p為拋物線軌道的焦準距,所以珠子的位置只需一個廣義坐標就可確定,選取x作為描述珠子運動的廣義坐標.
珠子的動能可以表示為
(1)
選取軌道底部作為零勢能面,珠子的勢能為
(2)
則可以給出珠子的拉格朗日量
(3)
將式(3)代入拉格朗日方程
可得珠子的運動方程
(4)
為了更方便在相平面上討論穩(wěn)定性,我們令
并將ωc稱為旋轉(zhuǎn)軌道的臨界角速度,則式(4)可表示為
(5)
2 穩(wěn)定性分析
2.1 平衡點分析
觀察式(5),系統(tǒng)的平衡點可分為兩種情況:
(1)當(dāng)ω≠ωc時,平衡點為(X,Y)=(0,0),即珠子靜止在軌道的最底部.
(2)當(dāng)ω=ωc時,珠子平衡只需要Y=0,而X可取任意值,即只要珠子速度為零,軌道上的任何地方都可以平衡.
下面將分別討論這兩種情況的穩(wěn)定性.
2.2 當(dāng)ω≠ωc時
在平衡點(0,0)處,式(5)的線性化方程為
(6)
其中
當(dāng)ω>ωc即α>0時,此時為兩個異號的實根,根據(jù)微分方程的定性理論[7],平衡點(0,0)為鞍點,是不穩(wěn)定的.而當(dāng)ω<ωc時即α<0,特征根是實部為零的兩個共軛復(fù)根
此時平衡點(0,0)稱為中心[7],是穩(wěn)定的但非漸近穩(wěn)定.
2.3 當(dāng)ω=ωc時
珠子可在任意位置平衡,設(shè)平衡點為
X=X*
做平移變換
X=Z+X*
將XOY平面上的平衡點(X*,0)平移到了ZOY平面的原點,式(5)變?yōu)?/p>
(7)
因為式(7)線性化后的系數(shù)矩陣‖A‖=0,表明原點為高階奇點,所以不能通過A的特征根去判斷原點的穩(wěn)定性.我們通過探究其相平面上的軌線方程,分析其穩(wěn)定性.將式(7)消去時間t可得相平面上的曲線滿足的微分方程
(8)
式(8)的通解為
(9)
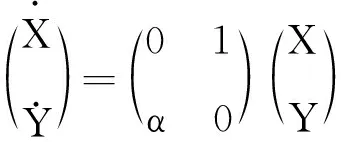
對于初值Y0在零附近的曲線,式(9)的圖像如圖2所示.可以看出,所有的解都有Y→0和Z→∞的趨勢.處在平衡位置的珠子,若被施加一個小的初速度,那么珠子的位置就會從零開始沿著軌道逐漸增大,表明ZOY平面上原點是不穩(wěn)定的,即在XOY平面上,平衡點(X*,0)是不穩(wěn)定的.
圖2 ω=ωc時,系統(tǒng)的相圖
上述分析可總結(jié)為:當(dāng)ω≥ωc時,平衡點是不穩(wěn)定的,而當(dāng)ω<ωc時,平衡點是穩(wěn)定的,但非漸近穩(wěn)定.
3 數(shù)值模擬
本節(jié)通過數(shù)值模擬,探究處在平衡點的珠子若被施加一個小的擾動,即一個小的初速度,珠子的運動軌跡會如何變化.
3.1 當(dāng)ω>ωc時
數(shù)值模擬的參數(shù)如表1所示.
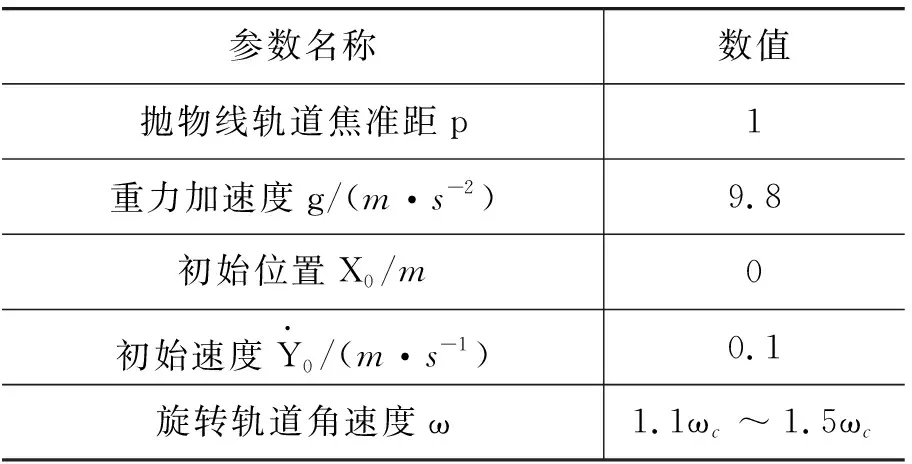
表1 ω>ωc時數(shù)值模擬中的參數(shù)
模擬結(jié)果如圖3所示.

圖3 ω>ωc時,珠子運動的數(shù)值模擬結(jié)果
圖3(a)從相平面描述了珠子的運動情況,可以看出,當(dāng)ω>ωc時,對于初位移為零,初速度為0.1 m/s的珠子,起初速度增大得很快,然后逐漸趨于一個恒定的速度,并且在這個過程中X持續(xù)增大.圖3(b)反映了珠子位置X和時間t的關(guān)系,同樣可以看出珠子的位置從零開始隨著時間逐漸增大.模擬結(jié)果表明,當(dāng)ω>ωc時,處在平衡位置珠子若受到一個小的擾動,則會沿著軌道向外運動,表明平衡點是不穩(wěn)定的.這與我們在2.2節(jié)中分析的結(jié)果一致.
3.2 當(dāng)ω<ωc時
參數(shù)如表2所示.
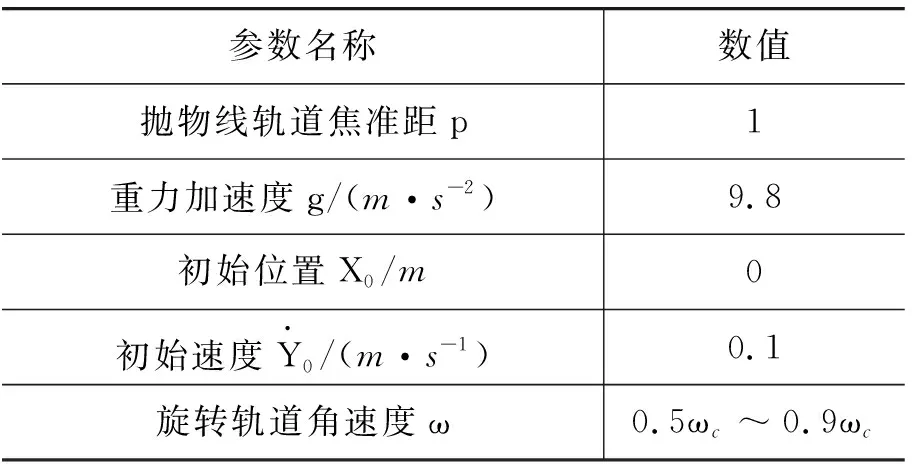
表2 ω<ωc時數(shù)值模擬中的參數(shù)
模擬結(jié)果如圖4所示.
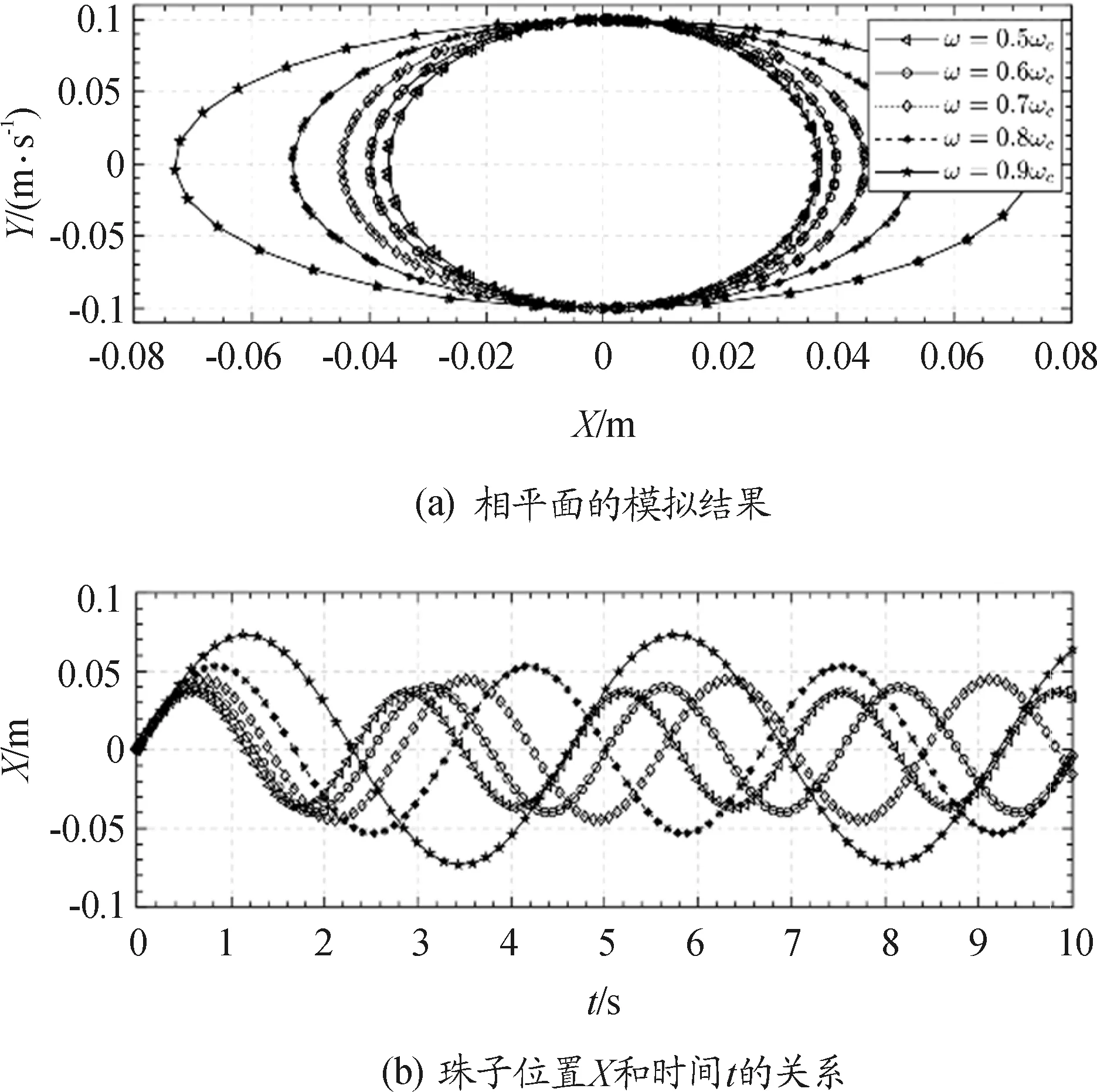
圖4 ω<ωc時,珠子運動的數(shù)值模擬結(jié)果
圖4(a)可以看出,當(dāng)ω<ωc時,對于初位移為零,初速度為0.1 m/s的珠子,其相平面的軌跡為橢圓,表明珠子始終在原點附近做往復(fù)運動.圖4(b)中描述了珠子位置X和時間t的關(guān)系,從中也可看到珠子在做往復(fù)運動,并且旋轉(zhuǎn)軌道的角速度ω越大,珠子往復(fù)運動的振幅越大.模擬結(jié)果可以說明,處在平衡點的珠子若被施加一個小的擾動,珠子仍在平衡點附近往復(fù)運動,即平衡點是穩(wěn)定的,但不是漸近穩(wěn)定的.這也與我們在2.2節(jié)中分析的結(jié)果一致.
3.3 當(dāng)ω=ωc時
通過2.3節(jié)分析,我們知道此時珠子可在任何位置平衡.選取不同的初始位置X0作為平衡位置,并給珠子施加一個小的初速度,參數(shù)如表3所示.
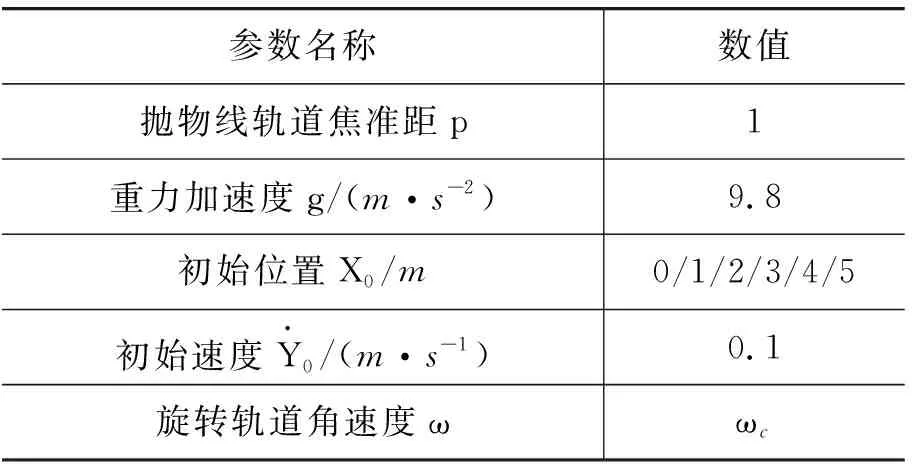
表3 ω=ωc時數(shù)值模擬中的參數(shù)
模擬結(jié)果如圖5所示.
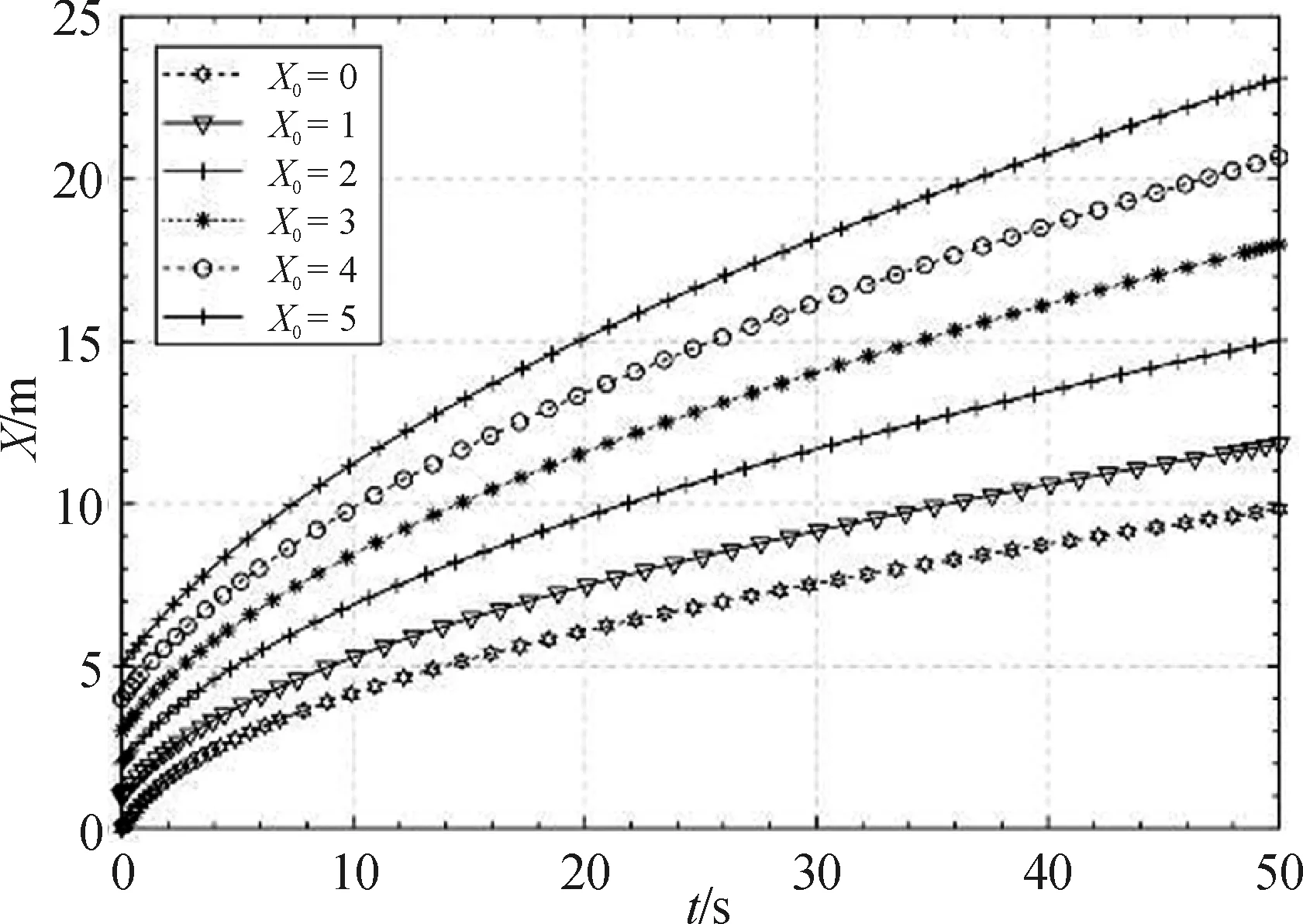
圖5 ω=ωc放置在不同平衡位置時,珠子運動情況的模擬結(jié)果圖
從圖5可以看出,當(dāng)ω=ωc時,處在平衡位置的珠子若被施加一個小的初速度,珠子都會隨時間,向X增大的方向運動,即珠子會遠離初始位置.表明初始放置的平衡位置是不穩(wěn)定的.這與2.3節(jié)中平衡點是不穩(wěn)定的結(jié)論相一致.
4 結(jié)論
本文研究了拋物線型旋轉(zhuǎn)軌道上的珠子的運動這一非線性力學(xué)問題.首先通過拉格朗日方程推導(dǎo)
出了珠子的運動方程,并分析了珠子的平衡點.接著基于微分方程的穩(wěn)定性理論,討論了不同軌道轉(zhuǎn)速時,各平衡點的穩(wěn)定性,得出結(jié)論:當(dāng)轉(zhuǎn)速大于等于臨界角速度時,平衡點是不穩(wěn)定的,若施加小的擾動,珠子會向著遠離平衡點的位置運動;當(dāng)轉(zhuǎn)速小于臨界角速度時,平衡點是穩(wěn)定的,即便存在小的擾動,珠子也會在平衡點附近做往復(fù)運動.最后通過數(shù)值模擬,驗證了分析的結(jié)果,并且更加直觀地反映了珠子的運動情況.
猜你喜歡
物理學(xué)報(2022年18期)2022-09-30
吉首大學(xué)學(xué)報(自然科學(xué)版)(2022年1期)2022-08-10
閩南師范大學(xué)學(xué)報(自然科學(xué)版)(2021年3期)2021-10-19
初中生學(xué)習(xí)指導(dǎo)·提升版(2020年6期)2020-09-10
數(shù)學(xué)大王·趣味邏輯(2020年3期)2020-03-12
意林·少年版(2017年19期)2017-11-03
好孩子畫報(2017年9期)2017-09-27
IT時代周刊(2015年7期)2015-11-11
散文百家(2014年11期)2014-08-21
中學(xué)生數(shù)理化·高一版(2009年6期)2009-08-31
