
A wireless geophone based on STM32①
2023-09-12 07:30CHENLeiCAOPeilinBAIJinghaoZHANGTing
High Technology Letters 2023年3期
CHEN Lei (陳 雷),CAO Peilin,BAI Jinghao,ZHANG Ting
(?Computer School,Beijing Information Science and Technology University,Beijing 100101,P.R.China)
(??College of Economics and Management, Beijng University of Technology, Beijing 100124,P.R.China)
(???Faculty of Information Technology,Beijing University of Technology,Beijing 100124,P.R.China)
Abstract Seismic geophone is the key instrument for seismic data acquisition in the fields of oil and gas exploration and other relevant fields.It plays an important role in data quality,subsequent processing and interpretation.Aiming at the shortcomings of the existing geophones,such as large volume,heavy weight,unable to monitor in real-time,and heavy workload of data transmission and storage,this paper designs and implements a wireless geophone based on STM32 embedded microcontroller.It is mainly composed of STM32 microcontroller,acceleration sensor,global positioning system(GPS)module,Wi-Fi module and real-time seismic data receiving and processing module.Firstly,the acceleration of vibration in three directions is sensed by the acceleration sensor; secondly,the sampling and analog-to-digital conversion of the vibration data is controlled by the microcontroller; thirdly,the vibration and GPS data are sent to the personal computer (PC) through Wi-Fi,and the personal coomputer PC-side software module completes the reception,display,monitoring and storage of the seismic data; finally,the feasibility and effectiveness of the designed wireless geophone are verified through actual seismic data acquisition experiments.
Key words: STM32 microcontroller,geophone,sensor,global positioning system(GPS)
0 Introduction
Seismic exploration is a main method of oil and gas exploration.It is carried out based on the difference of reflected waves in different geological conditions.Through the collection of seismic waves returned after artificial excitation,the geological structure of the underground is analyzed and interpreted.The instrument used to detect and collect seismic wave is very important in the exploration process.It is the most front-end equipment for receiving seismic waves,directly sensing the direct and reflected seismic wave,and plays a key role in the signal-to-noise ratio and accuracy of seismic data acquisition[1].The response characteristics of the geophone determine whether the seismic wave can be accurately induced,and its performance determines the accuracy of seismic exploration data[2].
The actual environment of engineering exploration is complex,there are many obstacles,and the use of wireline seismic exploration instruments is inconvenient,which limits their use in engineering exploration sites.Wired seismic instruments are prone to wiring troubles and cable joints are prone to failures.With the increase of functional requirements,the amount of data transmitted by the seismograph is increasing[3],wired seismic instruments require more and more cables,which increases the cost of manpower and material resources required to retract and release cables[3].Since the 1930s,after nearly a century of development,seismic instruments have experienced six generations of development and changes, including analog light spot seismometers, digital seismometers, telemetered seismometers,24 bit A/D telemetered seismometers,and all digital telemetered seismometers[4].Since the fourth generation of telemetered seismograph,seismograph is no longer limited to wired,and has begun to develop into wireless.Nowadays, although wired instruments still play a leading role in seismic exploration,with the rapid development of storage equipment and wireless communication technology,wireless instruments are increasingly used in seismic exploration.The wireless seismic instrument is different from the previous wired instruments.It abandons the transmission line,which can greatly reduce the capital investment in signal transmission medium,reduce the transportation cost,and improve the flexibility of field layout of the instrument[5].In view of its great potential,high exploration efficiency,stable performance and low cost,wireless geophone has become a research hotspot in the field of seismic exploration.
Wireless geophone is studied and a wireless geophone based on STM32 is designed and developed in this paper.The geophone is designed based on STM32 microcontroller unit (MCU) and connected with related modules.It can collect seismic data in three directions at the same time.It has the characteristics of small size,low power consumption,low cost,stable performance and portability.The personal computer(PC)software module can realize real-time reception,monitoring,display and storage of seismic data.
1 System scheme design
The overall design scheme of the wireless geophone based on STM32 is shown in Fig.1.
The external power supplies power to the geophone system power module and STM32 microcontroller,and the system power supplies power to the external module global positioning system(GPS)module and network module.The commissioning serial port,GPS module and network module use different universal synchronous/asynchronous receiver/transmitter(USART) serial ports to communicate with MCU.The vibration sensor uses inter-integrated circuit (IIC) bus to communicate with MCU.The vibration sensor is equipped with an AD converter,which can directly perform analog-to-digital conversion.The MCU uses general-purpose input/output (GPIO) pin to control the light emitting diode (LED) indicator to indicate the working state of the geophone system.
The working process of the wireless geophone designed in this paper is as follows.First,power on the STM32 microcontroller module and the system power module.After the system power supply is stable,the GPS module collects the positioning information,the vibration sensor collects the vibration signal generated by the artificial source,and the STM32 microcontroller receives the collected data through the USART serial port.After the GPS positioning information is analyzed and the vibration signal is converted,they are sent to the network module through the USART serial port.The software module at the receiving end receives,processes,monitors and stores the vibration data sent by the wireless transmission and reception network module in real-time, and displays the acquired seismic data through the user interface(UI).
2 System hardware design
2.1 STM32 single chip microcomputer
The core of the geophone design in this paper is STM32F407ZGT6 single chip microcomputer produced by Punctual Atom (Guangzhou) Technology Co.,Ltd.The microcontroller core is a Cortex-M4 core specially designed for embedded system by ARM Company,which is a 32-bit RISC pipeline structure[6-7].The Coterx-M4 core can achieve the processing capacity of 210 DMIPS when running at a high speed of 168 MHz.It has strong floating point computing capacity,enhanced DSP (digital signal processor) processing instructions,and has a faster communication interface.Cortex-M4 uses a 90 nm process to reduce the working voltage of the central processing unit(CPU)core to 1.2 V,reducing the system power consumption.STM32F407ZGT6 software configuration management (SCM) supports debugging of two serial wire debug (SWD) data lines,which saves resources and is more convenient for development and debugging.With up to 17 communication interfaces,it is convenient to connect multiple external modules at the same time.In a word,the high performance,low power consumption,multi-function, high stability, low cost and other performances of STM32F407ZGT6 single chip microcomputer fully meet the design requirements of wireless geophone system.
2.2 Vibration sensor
The STM32F407ZGT6 microcomputer also needs an external vibration sensor to conduct inductive acquisition of seismic data.The MPU6050 vibration sensor is selected as the seismic data sensor in the geophone design of this paper.The pin connection diagram of the MPU6050 sensor is shown in Fig.2.
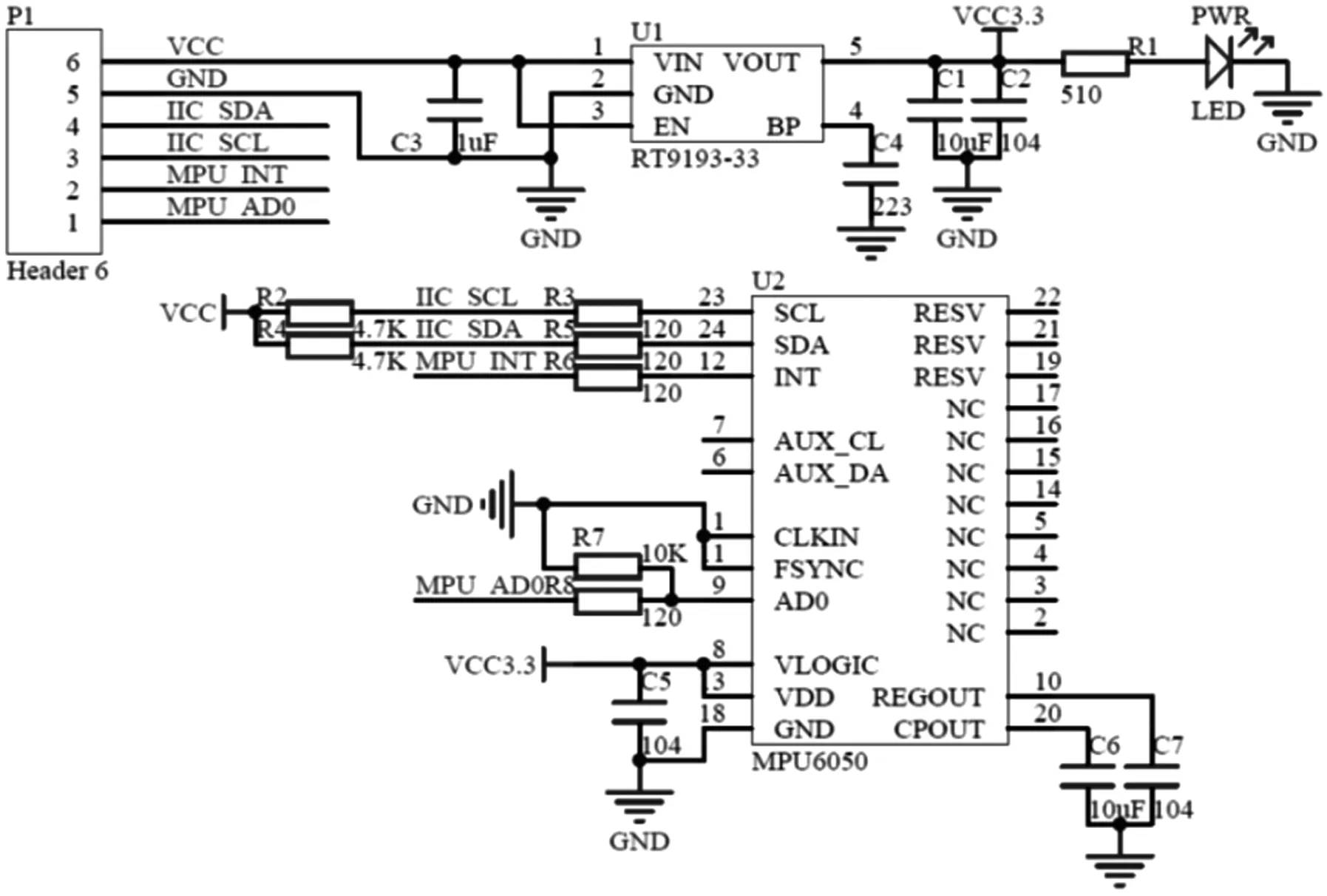
Fig.2 MPU6050 pin connection diagram
The MPU6050 sensor is integrated 6-axis motion processing module launched by InvenSense,an American professional motion sensing and tracking component manufacturer.It is internally equipped with seven 16 bit analog to digital converter (ADC) circuits,including three gyroscopes,three accelerometers,and one internal temperature sensor.The conversion circuit communicates with the microcontroller through the built-in IIC bus[8].The ADC converted data is processed by digital motion processor (DMP) and stored in first e input first output (FIFO).The MCU controls the microprocessor unit (MPU) by reading and writing the internal registers of the chip.
2.3 Wireless positioning GPS
The GPS module in the wireless geophone system designed in this paper uses a high-performance GPS/Beidou module produced by ALIENTEK (Punctual Atom).The module uses S1216F8-BD module,with 167 channels,tracking sensitivity up to 165 dBm,and measurement output frequency up to 20 Hz.Pin circuit connection of the ATK-S1216F8-BD GPS/Beidou Group is shown as Fig.3.
The module sets various parameters through the serial port,which can be reserved in the read only memory (ROM).The module has its own Internet packet exchange protocol (IPX) interface,which can be connected to various active antennas with strong signals.The module is compatible with 3.3 V/5 V level,which is convenient to connect with MCU.The module has its own rechargeable backup battery,which can save ephemeris data after the main power supply is powered down[9].
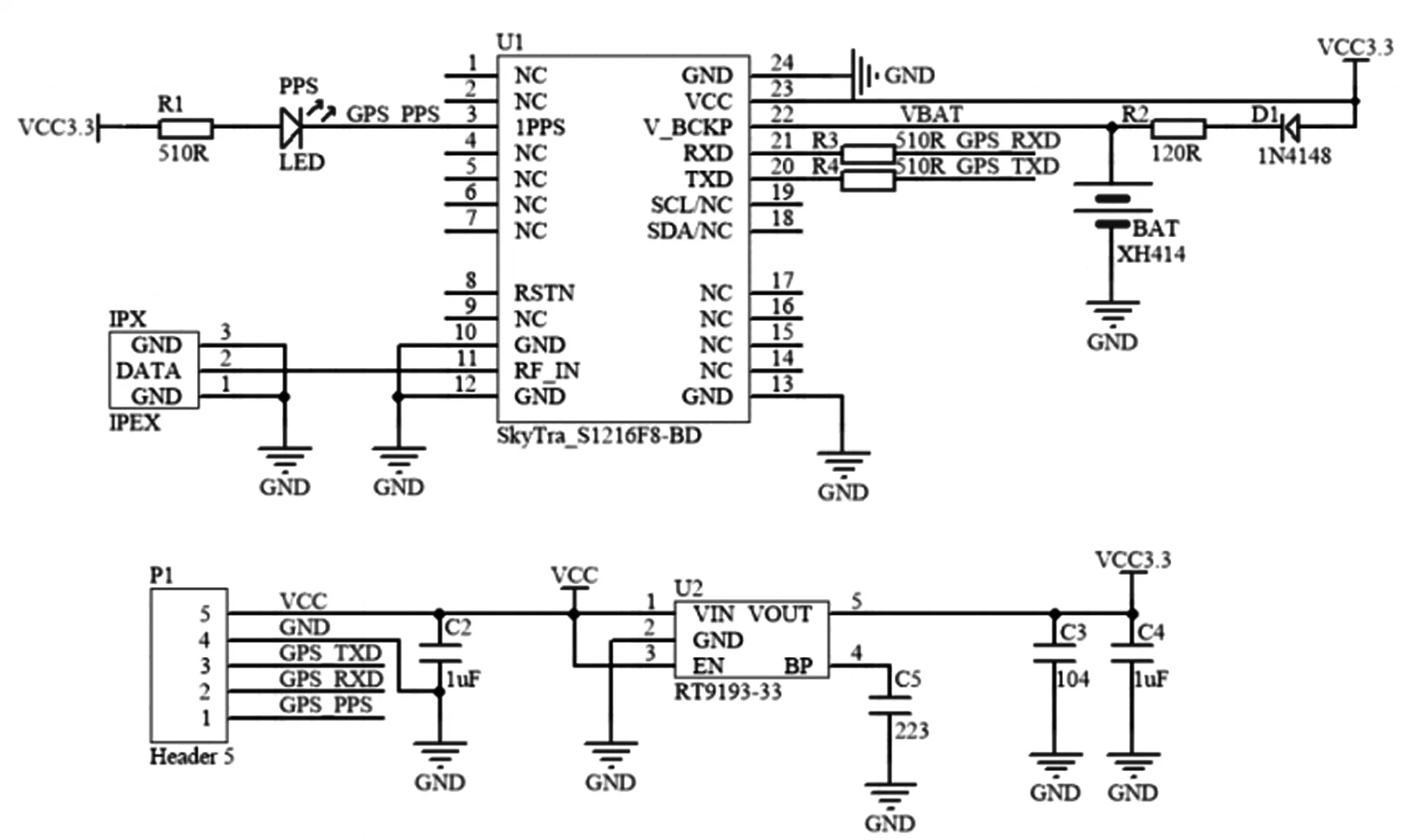
Fig.3 Schematic diagram of GPS module
STM32F407ZGT6 single chip microcomputer is equipped with multiple USART serial ports to facilitate connection with the module.MCU can configure various parameters of the module through the USART serial port.The chip includes an IPX interface for external edge antenna to achieve GPS positioning.The chip has five pins,whose functions are shown in Table 1.
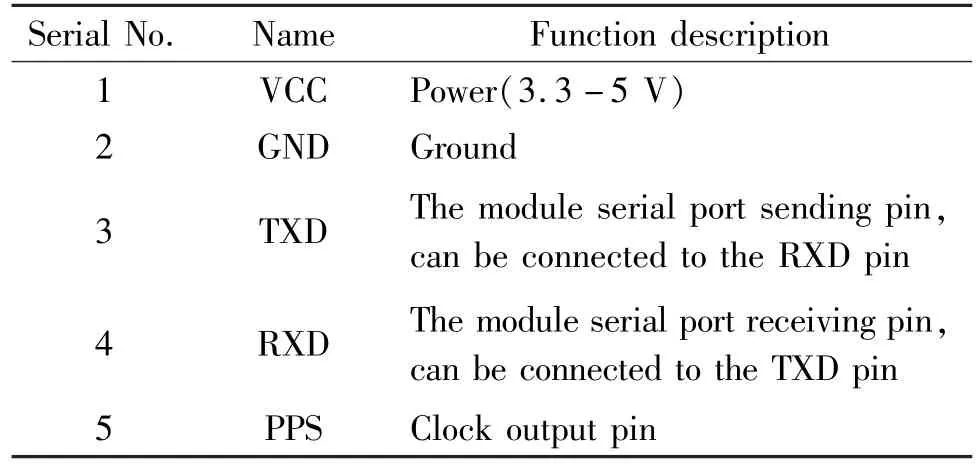
Serial No.Name Function description 1 VCC Power(3.3 -5 V)2 GND Ground 3 TXD The module serial port sending pin,can be connected to the RXD pin 4 RXD The module serial port receiving pin,can be connected to the TXD pin 5 PPS Clock output pin
The functions of each pin are shown in the function description column in Table 1.GPS data is sent to MCU through TXD pin,and instruction data sent by MCU is received through RXD pin.PPS is the clock synchronization pulse output pin.
2.4 Network module
After comparing various wireless communication methods,Wi-Fi network is selected to establish the TCP/IP connection between STM32F407ZGT6 MCU and PC software module in this paper.The Wi-Fi module ATK-ESP8266 of the Punctual Atomic Corporation is selected.The pin connection principle of this module is shown in Fig.4.
The ATK-ESP8266 is a high-performance UARTWi-Fi (serial wireless) module introduced by ALIENTEK.The ATK-ESP8266 module uses a serial port to communicate with MCU or other serial devices.It has a built-in TCP/IP protocol stack,which can easily realize the mutual conversion between serial ports and Wi-Fi[10].
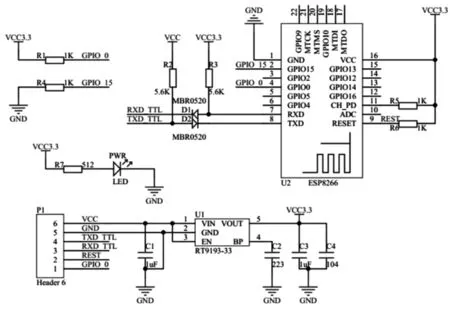
Fig.4 Schematic diagram of Wi-Fi module
The ATK-ESP8266 module supports the LVTTL serial port.After connecting with the equipment (the system is a wireless geophone) through the serial port,the data can be sent out through the network (Wi-Fi).This module supports the mode of serial port to Wi-Fi STA,serial port to AP,and STA+Wi-Fi AP,which enables rapid construction of data transmission scheme between serial port and Wi-Fi[11].The above characteristics of this module make it very suitable for the design requirements of this paper,which is also the main reason for choosing it as the network module.The functions of each pin of the ATK-ESP8266 module are shown in Table 2.

Serial No.Name Function description 1 VCC Power(3.3 -5 V)2 GND Ground 3 TXD The module serial port sending pin,can be connected to the RXD pin The module serial port receiving pin,can be connected to the TXD pin 5 RST Reset (active at low level)4 RXD 6 IO_10 Used to enter the firmware burning mode.Low level is the burning mode, and high is the operation mode (default)
3 Wireless geophone system realization
3.1 MPU6050 vibration sensor configuration
The MPU6050 writes instruction data to the MPU6050 register according to the IIC communication protocol.The MPU6050 initialization process is as follows.
(1) Initialize IIC interface;
(2) Reset MPU6050 controlled by power management register 1;
(3) Set the full range of angular velocity sensor and acceleration sensor by the gyroscope configuration register and acceleration sensor configuration register;
(4) Set other parameters.
1) Configure interrupt,controlled by interrupt enable register;
2) Set AUX IIC interface,controlled by control register;
3) Set FIF0,controlled by FIFO enable register;
4) Gyroscope sampling rate,controlled by frequency division register;
5) Set the digital low-pass filter,which is controlled by the configuration register;
6) Set the system clock it is controlled by the power management register 1.Thex-axis gyro PLL is generally selected as the clock source;
7) Enable angular velocity sensor (gyroscope)and acceleration sensor,which is controlled by power management register 2[12].
3.2 GPS module configuration
The GPS-S1218F8-BD module adopted by the GPS module of this system follows the unified NMEA-0183 standard protocol of GPS navigation equipment,uses ASCII code,and transmits GPS positioning information by frame.The system mainly uses the $GNGGA (global positioning system fix data) command.The basic format of the $GNGGA statement is
$GNGGA,(1),(2),(3),(4),(5),(6),(7),(8),(9),M,(10),M,(11),(12)?hh(CR)(LF)where M is the unit,hh is the checksum,CR and LF represent carriage return and line feed respectively,and the meanings of (1)—(12) are as follows.
(1) UTC time,Format: hhmmss.ss.
(2) latitude,Format: ddmm.mmmmm(Degrees format).
(3) Latitude Hemisphere,N or S.
(4) Longitude,Format: dddmm.mmmmm(Degrees format).
(5) Longitude Hemisphere,E or W (East or West longitude).
(6) GPS status,0 =no positioning,1 =non differential positioning,2 =differential positioning.
(7) Number of satellites in use for positioning(0 -12).
(8) HDOP horizontal accuracy factor (0.5 -99.9).
(9) Altitude ( -9999.9 to 9999.9 m).
(10) Geoid height ( -9999.9 to 9999.9 m).
(11) Differential time (seconds since the last time differential signal was received,non differential positioning,this item is blank).
(12) Differential reference base station label(0000 to 1023,first О will also be transmitted,non differential positioning,this item is blank)[13].
After the above parameters are set,the configuration of GPS-S1218F8-BD module is completed.
3.3 Network module configuration
The network module selected for the wireless geophone system in this paper is ATK-ESP8266 of Punctual Atomic Corporation.This Wi-Fi module can be used for secondary development based on the official SDK,or configured with the official firmware AT command.The system uses the AT command configuration mode.In the designed wireless geophone system,ATK-ESP8266 Wi-Fi works in serial wireless Wi-Fi AP mode and TCP server mode.The specific configuration is shown in Table 3.
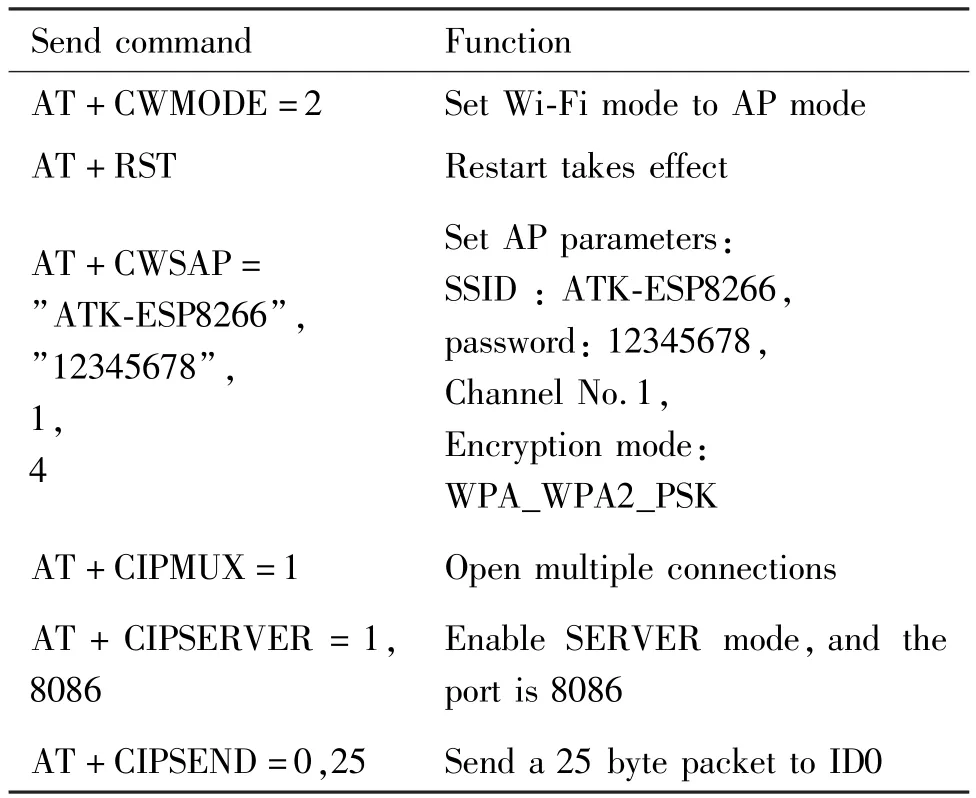
Send command Function AT+CWMODE=2 Set Wi-Fi mode to AP mode AT+RST Restart takes effect AT+CWSAP=”ATK-ESP8266”,”12345678”,1,4 Set AP parameters:SSID : ATK-ESP8266,password:12345678,Channel No.1,Encryption mode:WPA_WPA2_PSK AT+CIPMUX=1 Open multiple connections AT + CIPSERVER = 1,8086 Enable SERVER mode,and the port is 8086 AT+CIPSEND=0,25 Send a 25 byte packet to ID0
3.4 Detailed design of receiver software
The development of the user interface uses the cross platform C + + graphical user interface application development framework Qt,in which the control components are mostly inherited from the QStyle class.QStyle class is an abstract base class that encapsulates the graphical user interface (GUI) appearance.The built-in components of QT can be used to meet almost all drawing requirements.
The UI interface of the wireless geophone PC terminal is mainly composed of text boxes,buttons,etc.,including five text boxes: seismic data display text box,IP address display text box,port number text box,GPS data display text box; two buttons: TCP connection button and seismic wave display button.The design result is shown in Fig.5.

Fig.5 PC receiver user interface
The five text boxes are mainly used to display the IP address and other data.The‘Connect’and ‘Display’ buttons realize the network connection between the wireless geophone and the PC terminal and the seismic data waveform display function respectively.The specific implementation methods of the two buttons are described below.
Network connection: Qt provides SOCKET (encapsulated based on class encapsulation mechanism),which realizes data reception based on its own signal slot mechanism.In this system,the PC works in TCP client mode,and the connection process is as follows.
(1) Add Qt + = network in the project documents.
(2) Create a QTcpSocket socket object.
new QTcpSocket(this).
(3) Create a TCP connection through QTcpSocket:
connectToHost(IP,port).
(4) Read the data sent by the other party,and the linked socket will trigger the readyRead signal.Need to receive the data in the corresponding slot function.Get the data through the function QTcpSocket->readAll()and display it in the corresponding text box.
Seismic wave display: The Qt chart module provides a set of easy-to-use chart elements.It uses the Qt graphic view framework,which can be used as QWIDGETS,QGraphicsWidget,or as a QML type.This system uses QChart,which can represent lines, spline curves,and scatter sequences with pole base plots.The drawing method is as follows.
(1) Install Qt chart module and add Qt + =charts in the project file.
(2) Use QChart in the code,write
# nclude < QtCharts >,using namespace Qtcharts.
(3) Draw seismic wave waveform curve according to data file generated by network transmission and QChart framework.
4 Experiments and analysis
In order to verify the feasibility and effectiveness of the wireless geophone system designed in this paper,vibration induction experiments were carried out under different experimental conditions.The experimental environment configuration is as follows: PC operating system Windows10,STM32F407ZGT6 MCU,ARM development tool MDK5 developed by Keil,QT5.9.1.
The acceleration sensor in this wireless geophone system can detect the acceleration changes in thex,y,andzdirections,so this geophone is a three components geophone,which can record three components of the particle vibration velocity vector,and simultaneously record the longitudinal,shear,and converted wave.In order to verify the feasibility and effectiveness of the wireless geophone system,experiments were carried out in the outdoor environment.In the experiment,the seismic source used the method of manual striking.The hammer was used to strike the ground near the location of the geophone with different frequencies and strengths to artificially excite seismic waves.The seismic wave generated by artificial excitation is received by the geophone system designed in this paper,and then sent to the PC for storage and display via wireless mode.Under the same sampling interval,the visualization results of seismic waves of different frequencies and amplitudes at PC terminal are shown in Fig.6.

Fig.6 Display of seismic wave with different frequencies
It can be seen from the seismic wave waveform shown in Fig.6 that the wireless geophone system designed in this paper can achieve seismic wave acquisition and wireless transmission with high sensitivity and wide bandwidth.Taking the second waveform accz1 on the left side of Fig.6 as an example,the occurrence of the two peaks is caused by two small amplitude knocks,that is,the amplitude of the seismic wave suddenly increases under the impact of the knock.The time interval between the occurrence of the two peaks is about 3850 ms,and the frequency is about 0.26 Hz,which is consistent with the actual knock frequency and amplitude.
When the striking frequency and amplitude change,the generated seismic waves are shown in the other eight waveforms in Fig.6 (accz0, accz2 -accz9).The seismic waveform obtained in Fig.6 is consistent with the actual source excitation frequency and amplitude,which effectively verifies that the sensor module,STM32 control module,network module and other related links in the wireless geophone system designed in this paper can work stably,and the sampling,AD conversion,wireless transmission,storage and display of seismic wave data can be correctly realized.Thus,the validity and feasibility of the wireless geophone design scheme based on STM32 proposed in this paper are verified.
5 Conclusion
This paper first introduces the working principle and system structure of the wireless geophone,then explains the system scheme and main functional modules,and finally verifies its effectiveness and feasibility through actual seismic wave data acquisition experiments.The next research direction is to use independent battery or solar power supply at the wireless geophone data acquisition terminal to meet the needs of long standby time in the field,and to add more seismic data processing,filtering,visual interaction and other functions at the PC software terminal.
 High Technology Letters2023年3期
High Technology Letters2023年3期
- High Technology Letters的其它文章
- Joint UAV 3D deployment and sensor power allocation for energy-efficient and secure data collection①
- Experimental study on the failure factors of the O-ring for long-term working①
- Research and experimental analysis of precision degradation method based on the ball screw mechanism①
- In-flight deformation measurement for high-aspect-ratio wing based on 3D speckle correlation①
- Semantic-aware graph convolution network on multi-hop paths for link prediction①
- A greedy path planning algorithm based on pre-path-planning and real-time-conflict for multiple automated guided vehicles in large-scale outdoor scenarios①