
Convolutional Neural Networks Based Indoor Wi-fiLocalization with a Novel Kind of CSI Images
2019-10-09 08:54:36HaihanLiXiangshengZengYunzhouLiShidongZhouJingWang
China Communications 2019年9期
Haihan Li,Xiangsheng Zeng,Yunzhou Li,Shidong Zhou ,Jing Wang
1 Beijing National Research Center for Information Science and Technology,Tsinghua University,Beijing 100084,China
2 Department of Electronic Engineering,Tsinghua University,Beijing 100084,China
Abstract: Indoor Wi-filocalization of mobile devices plays a more and more important role along with the rapid growth of location-based services and Wi-fimobile devices.In this paper,a new method of constructing the channel state information (CSI) image is proposed to improve the localization accuracy.Compared with previous methods of constructing the CSI image,the new kind of CSI image proposed is able to contain more channel information such as the angle of arrival (AoA),the time of arrival (TOA) and the amplitude.We construct three gray images by using phase differences of different antennas and amplitudes of different subcarriers of one antenna,and then merge them to form one RGB image.The localization method has off-line stage and on-line stage.In the off-line stage,the composed three-channel RGB images at training locations are used to train a convolutional neural network (CNN)which has been proved to be efficient in image recognition.In the on-line stage,images at test locations are fed to the well-trained CNN model and the localization result is the weighted mean value with highest output values.The performance of the proposed method is verified with extensive experiments in the representative indoor environment.
Keywords: convolutional neural network;indoor Wi-filocalization; channel state information; CSI image
I.INTRODUCTION
With the rapid development of Wi-finetworks and the explosive increase of location-based services such as indoor navigation,indoor tracking and activity recognition [1-3],the location of the mobile device is more and more important and indoor Wi-filocalization becomes a research hot-spot [4-6].
Different kinds of localization methods have been proposed.Some of the methods are based on the AOA,some of the methods are based on the TOA and others are based on the signal propagation model [7-9].Some of these methods need more than one access point(AP) and the performances of these methods are highly relying on the measurement accuracy which is hard to achieve with commodity Wi-fidevices.The indoor fingerprint based localization methods have a better performance than the above methods and attract the interest of researchers [10].The main idea of the fingerprint based localization method is extracting feature information of the measured locations which is the so called ‘fingerprint’and in the real-time localization stage,the Wi-fisignals of the device needed to be localized are compared with the known features to decide the localization.As a result,the indoor fingerprint based localization methods usually have two stages,i.e.,an off-line training stage and an on-line localization stage.In the offline training stage,Wi-fisignals of various reference points (RPs) are measured and collected to build a database.With the help of the database,the features of the RPs can be extracted and used to train a model.In the online localization stage,the Wi-fisignals of the target device are measured and fed to the welltrained model to output the location result.
In this paper,a new method of constructing the channel state information (CSI)image is proposed to improve the localization accuracy.
Received signal strength (RSS) is a kind of widely used fingerprints mainly because RSS is easily measured at the Wi-fireceivers[11-13].In RADAR which is the first to use RSS as the fingerprint,the location process is carried out with a deterministic method by calculating the Euclidean distance between the RSSs of the device needed to be localized and the RSSs of the RPs [14].There are three main shortcomings of using RSS as the fingerprint[15].First,RSS is a kind of coarse channel information which means RSS cannot precisely reflect the relationship between the wireless channel and the propagation environment.Second,RSS of a fixed location varies a lot over time because RSS is the converged result of each path in the propagation environment and sensitive to the time varying multipath fading.Third,it is hard for RSS to be suitable among different kinds of mobile devices.For example,laptops and cell phones have different antenna characteristics so the RSSs of the laptops and cell phones are different in the same location.The model trained with the RSSs of laptops may not work well with the RSSs of the cell phones [4,6].
CSI is the wireless channel response of each antenna and each subcarrier in a multiple-input,multiple-output orthogonal frequency-division multiplexing (MIMO-OFDM) system.CSI is the aggregation of the multipath information,so CSI can show the multipath effect better and more accurately than RSS [16-19].Open-source device drivers for commodity Wi-finetwork interface cards (NICs),such as the Atheros AR9580 chipset,is available nowadays,which makes it easy for us to obtain CSI in the Wi-fidevices [4].For a given location,AP and devices stay static in space.Therefore,the propagation environment keeps stable which means the multipath information also changes little [25-28].In other words,if the locations of AP and device are established,the CSI between the AP and the device are guaranteed and unique,which should be a more accurate feature than RSS [20].How to extract the static CSI and how to use the static CSI as a-priori information in channel estimation have been discussed in [20].
CSI data cannot directly reflect useful information of the channel,so some estimation methods of channel parameters like the MUSIC algorithm are used to estimate wireless channel parameters,e.g.,the number of main paths,AOAs and TOAs of main paths [21,29,30].In order to omit the above calculation process of the parameter estimation,some CSI image construction methods are proposed to deal with CSI data directly.Confiproposed in [6]builds a CSI image with multiple channels by only using the amplitude information of CSI.For one RP,the CSI image containsMsub-images,whereMis the number of receiving antennas.For one sub-image,TCSI measurements withNsubcarriers at the same RP are grouped to construct anNT× image matrix.Therefore,if the number of receiving antennas is 3 which is the typical antenna number of Atheros AR9580 chipset,the CSI image has 3 channels which is similar to the RGB image.Cifiproposed in [4,5]puts forward another kind of CSI image by only using the phase information of CSI.Cificonstructs a 60 1× CSI vector by combining 30 phase differences between the first antenna and the second antenna with 30 phase differences between the second antenna and the third antenna.Then,60 packet samples are used to construct a 60 60× CSI image.It should be noted that the CSI image in Cifionly has one channel.
Different from the Cifiand the ConFi,a novel kind of CSI image construction method is proposed in this paper.Like the RGB images,the CSI image we proposed has 3 sub-images.The first sub-image is the amplitudes of subcarriers of the first antenna ofTCSI mea-surements at the same RP.The second sub-image is theNphase differences between the first antenna and the second antenna.The third sub-image is theNphase differences between the second antenna and the third antenna.Due to the CSI output of Atheros AR9580 chipset,N=114 andT=114 make the CSI image be a 114 114 3×× RGB image.Therefore,the CSI image can contain more channel information such as the AOA,TOA and amplitude.
CSI images are fed to train CNN models to extract the features of given locations mainly because the CNN model has been proved to be effective in image recognition [22].Both Cifiand Conficlaim to be the first to employ the CNN for indoor localization while we have already employed the CNN for channel feature extraction in [20].A light-weight CNN model named Shuff l eNet V2 is adopted in our localization for the reason that the Shuff l eNet V2 is efficient and can be easily applied with mobile devices [23].
The main contributions of this paper are summarized as follows.
· We propose a novel construction method of CSI images.This new kind of CSI images has 3 sub-images like RGB images,which means the CSI image constructed via the new proposed method can contain more channel information such as the AOA,TOA and amplitude.
· The CSI images are used as the input data to train the light-weight CNN model.The outputs of the well-trained CNN model are used as the weighted average coefficients to estimate the position of the devices.
· Repeated measurements with commodity 2.4 GHz Wi-fiare carried out in the typical indoor environment to verify the performance of the proposed localization method.The results show that the proposed localization method achieves better location accuracy than two existing schemes.Besides,the impact of various system parameters is evaluated.
The paper is organized as follows.Section II presents the CSI image construction method we proposed.The CNN stricture we adopted is discussed in Section III.The localization method is given in Section IV.Section V presents the results of repeated measurements and the performance of the method.Section VI concludes this paper.
II.CSI IMAGE CONSTRUCTION
2.1 CSI feature
The CSI matrix of a MIMO-OFDM system with 114 sub-carriers and 3 receiving antennas is shown in equation (1) and equation (2).
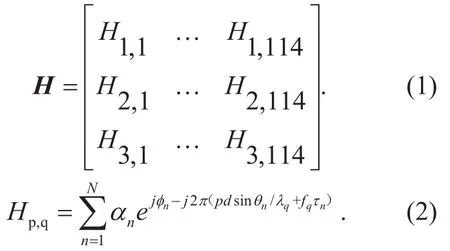
Hp,qis the CSI of thepthantenna and theqthsubcarrier.Nis the number of Multipath Components (MPCs) which is directly related to the main scatterers in the propagation environment.Since the main scatterers in the indoor propagation environment are mainly walls and other immovable scatterers,Nis relatively spare and stable when the locations of AP and devices are established [25,26].αnis the complex amplitude of thenthpath which represents the propagation attenuation.φnis the frequency-independent random phase noise of thenthpath.λqandfqare the wavelength and the frequency of theqthsubcarrier.dis the pairwise separation between antennas (typically half the wavelengthλ).θnandτnare DOA and TOA of thenthpath.
N,θnandτnare mainly determined by the main scatterers in the indoor propagation environment.Wireless channel refers to the free space from the transmitter to the receiver which can be determined by the ref l ection off every object in the radio environment.The radio propagation environment is main determined by the real spatial information in the same way.So the CSI is mainly determined by the location of the target device and can be the unique feature of the location.According to equation (2),CSI is the sum of each path the transmitted signal has traveled.Therefore,both the amplitudes and phases can contain the CSI feature.Roughly stated,the amplitudes can represent more information of the distance and the number of MPCs while the phases can represent more information of the DOA and the TOA.
2.2 Phase difference information
In fact,the phases of the CSI provided from the Atheros AR9580 chipset contain some offsets.Denoting ∠Hp,qas the phase of the CSI got from the Atheros AR9580 chipset.∠Hp,qcan be written as


2.3 CSI image construction
The Atheros AR9580 chipset provides a CSI matrix on 114 subcarriers from each of the three antennas.114 packet samples for every training location are used to form a CSI image.The amplitudes of the CSI on each subcarrier of the first antenna of the 114 packet samples are formed to be a 114× 114 matrix which is the first sub-image.The phase differences of CSI of the 114 packet samples on each subcarrier between the first antenna and the second antenna construct a 114× 114 matrix which is used as the second sub-image.The phase differences of CSI of the 114 packet samples on each subcarrier between the second antenna and the third antenna construct a 114× 114 matrix which is used as the third sub-image.Every sub-image is in fact a real number 114× 114 matrix whose values are normalized to a range of 0-255.Therefore,each sub-image is an 8-bit gray image and the three sub-images construct an RGB image as shown in figrue 1.Sub figure (a),(b),(c) in figrue 1 are the three 8-bit gray sub-images and sub figure(d) is the composed RGB CSI image of three channels.
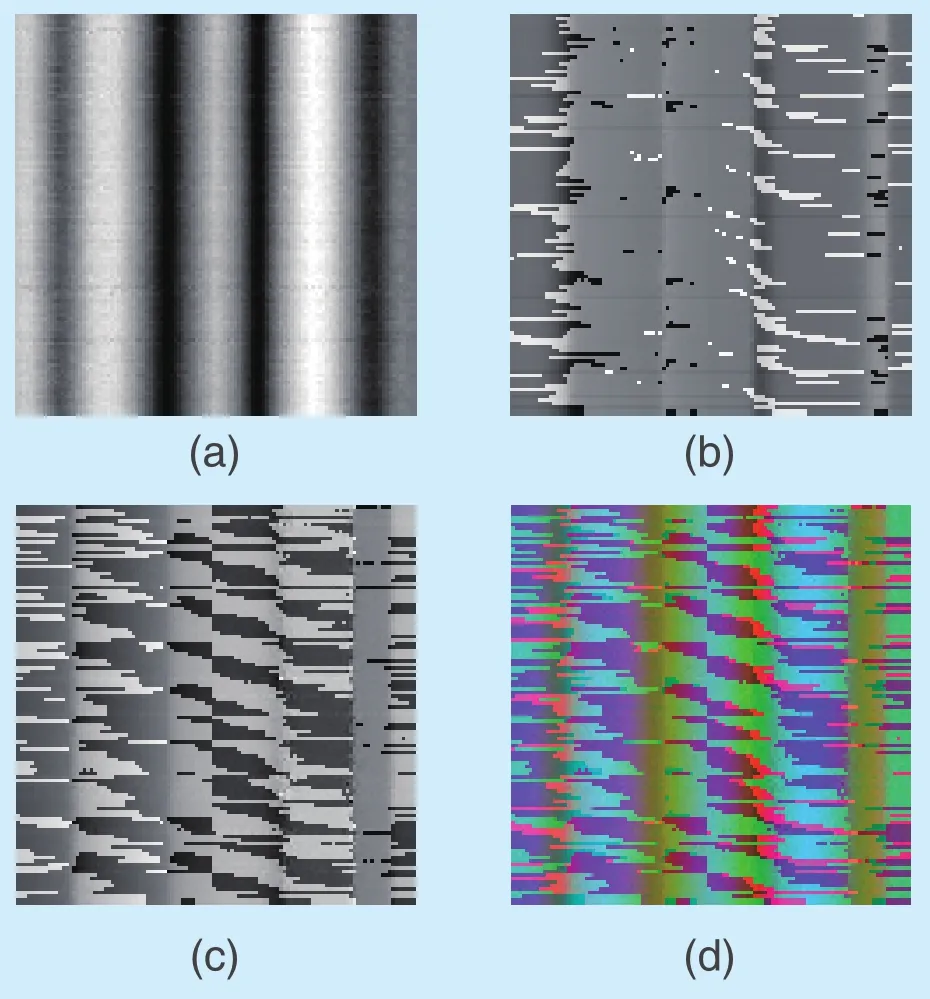
Fig.1.CSI sub-images and CSI image.
III.CNN STRUCTURE
3.1 CNN structure
The CNN is a widely used deep learning technique duo to the excellent performance for the image recognition.The CNN is characterized by consisting of one or more convolution layers and pooling layers.The CNN has three unique concepts: local filters,max-pooling,and weight sharing.There are three main kinds of layers in CNN which are convolution layers,pooling layers and fully connected layers[22].
In the convolution layer,a set of filters is applied to process small local parts of the input data.These filters are replicated along the whole input space.

In the pooling layer,a lower-resolution version of the convolution layer activation is generated by taking the maximum filter activation from different positions within a specified window.
The fully connected layer combines inputs from all positions to classify the overall inputs.In this localization method,the output is the probability of the target device at the corresponding RP.Therefore,it is a multi-classification problem.The softmax is chosen as the activation function of output layer.The softmax can be defined as
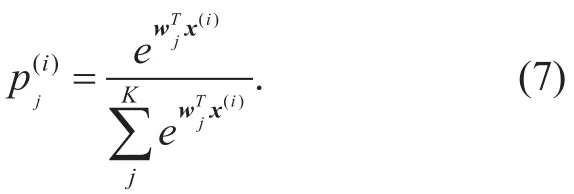
pjis thejthoutput of the fully connected layer which is in the range of [0,1],x(i)is the output vector of the second last layer whereiis the index of training CSI images,wjis the weight vector of thejthoutput of the fully connected layer.Kis the size of the output layer which equals the number of RPs.
The cross-entropy loss function with theL2 regularization is chosen as the loss function.The regularization term helps to avoid over fitting.The cross-entropy loss functionJ(w) can be written as [24]
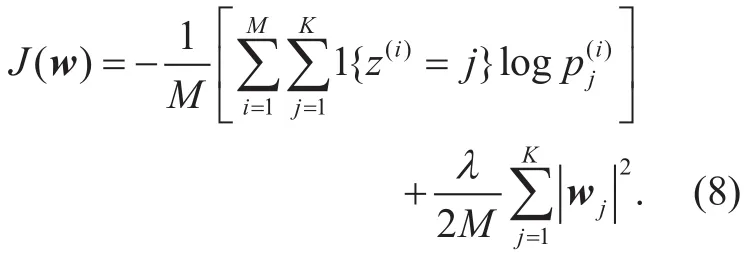
MandKare the sizes of the input training CSI image set and the size of output layer.1{.}is the indicator function.z(i)is the index of the RP of theithCSI image.λ>0 is known as the regularization parameter.The goal of the training of the CNN is to minimize the cross-entropy loss functionJ(w).The partial derivative is:

The classic back propagation (BP) algorithm of the CNN is used to pass the cross-entropy loss function from the output layer to the input layer to update the parameters along with the derivatives [22].
3.2 ShuffleNet V2 structure
ShuffleNet V2 is a light-weight CNN model proposed by [23].Based on the intuition of its previous version ShuffleNet V1,it adopts a simple operator named channel split that split the input c channels of feature map into two branches,one with c’ channels and the other with c-c’.By following the thought of bottleneck structure,one branch remains as identity and the other consists of separable depth-wise convolution operation.There are two similar designs of this proposed structure,one is called basic unit and the other is called down sampling unit.Specifically,the basic unit is made up of a 1×1 point-wise convolution and a 3×3 depth-wise convolution,followed by another 1×1 point-wise convolution in one of the two branches.The down sampling unit has a two-stride 3×3 depth-wise convolution separately on both the two branches.As for the branches combinations,both units concatenating the output feature map of the two branches on channel dimension,after which a channel shuffling operation follows.ShuffleNet V2 is built upon the basic block that consists of multiple combinations of these two basic units.This structure is efficient in float-point operations (FLOPs) and memory access cost(MAC),which are the mainly consideration when designing network on mobile devices.Besides,it also reaches state-of-the-art performances on classification and object detection tasks.
The 114 114 3×× CSI images are fed to the ShuffleNet V2.The layers are a convolution layer,a max pooling layer,Stage 1,Stage 2,Stage 3,a convolution layer,a global pooling layer and a fully connected layer in order.Stage 1 and Stage 3 contain a down sampling unit and 3 basic units.Stage 2 contains a down sampling unit and 7 basic units.Kis the number of RPs.The sizes of output channels are predefined by the ShuffeNet v2.Overall architecture of ShuffeNet v2 is introduced in Table I and figrue 2.

Fig.2.Structure of the Shuff l eNet V2.
IV.THE LOCALIZATION METHOD
As introduced above,the localization method consists of off-line stage and on-line stage.
In the off-line stage,CSI data are collected and CSI images are constructed at each RP.The constructed CSI images are fed to train the Shuff l eNet V2.
In the on-line stage,the CSI of the target device is measured and sent to the well-trained CNN.The outputs areKprobabilities which can be interpreted as the probability that the target device is located at each RP.Therefore,the outputs of the CNN in fact are the result of a multi-classification problem while the reallocation of the target device can be anywhere.The weightedRlargest outputs are used to calculate the real coordinate of the target device.
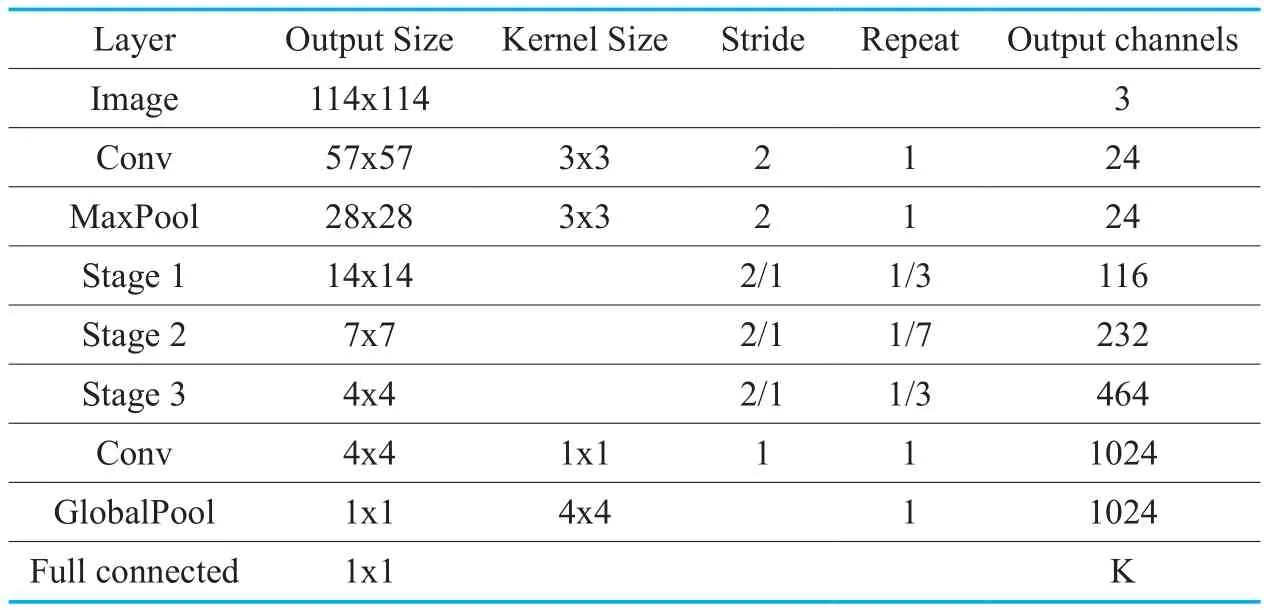
Table I.Overall architecture of ShuffeNet v2.
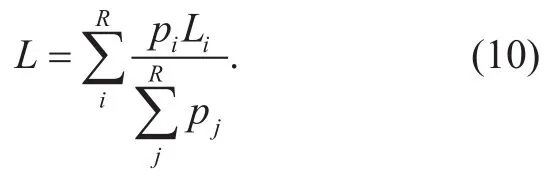
Lis the calculated coordinate of the target device.Liis the real coordinate of theithRP of theRlargest RPs.piis theithoutput of the CNN related to theithRP.
V.MEASUREMENT AND VALIDATION
5.1 Measurement configuration
To verify the performance of the proposed localization method,channel measurement campaigns were carried out in an office room in Tsinghua University.CSI data are measured and stored from repeated measurements.
Table 2 presents the system configuration of measurements.
Tx is set at the fixed location and 14 RPsare scattered as showed in figrue 3.In the experiments of the CiFi,distance between two adjacent training or two testing locations is set to the same 1.8 m and theRis set to be 2.Therefore,the location of the target device is easily calculated as the midpoint of the 2 RPs while the real location of the target device can be anywhere.In the experiments of the ConFi,the data from the RPs are used as the training sets,validation sets and test sets.The performance of the Confiin the locations which are not the RPs are not verified.In our experiment setup,RPs are distributed randomly in the office.11 RPs are chosen as the training sets and 3 RPs are chosen as the test sets as shown in figrue 3.Training locations are marked as red dots and testing locations are marked as yellow dots.
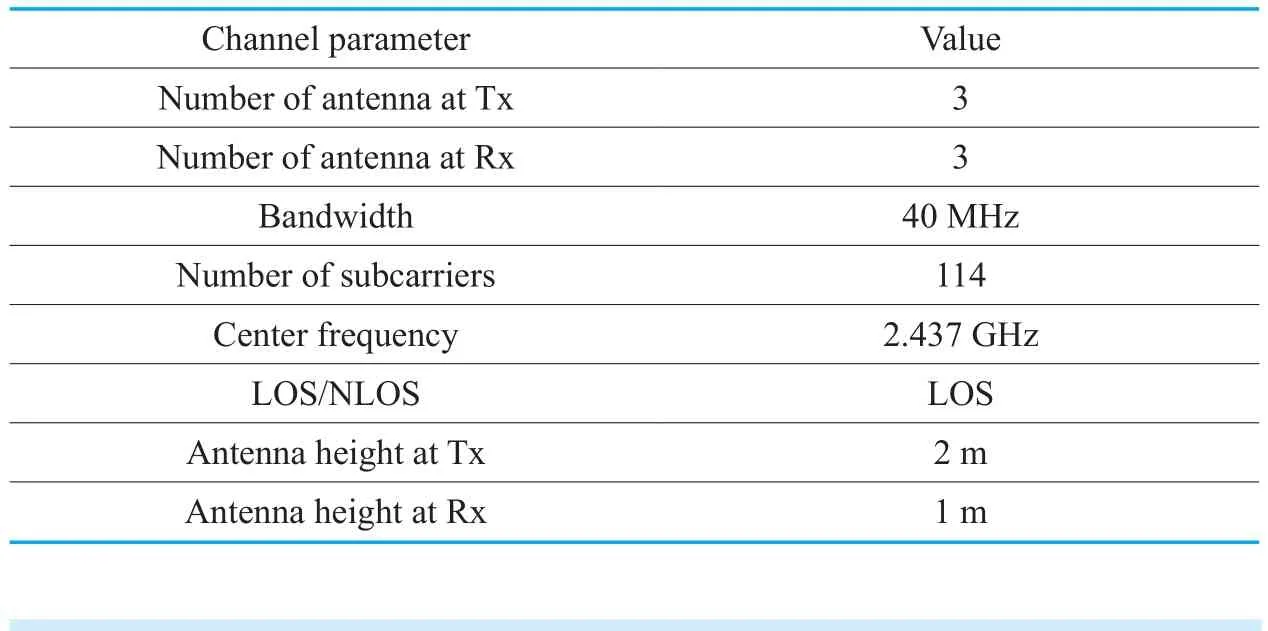
Table II.System configuration of measurements.
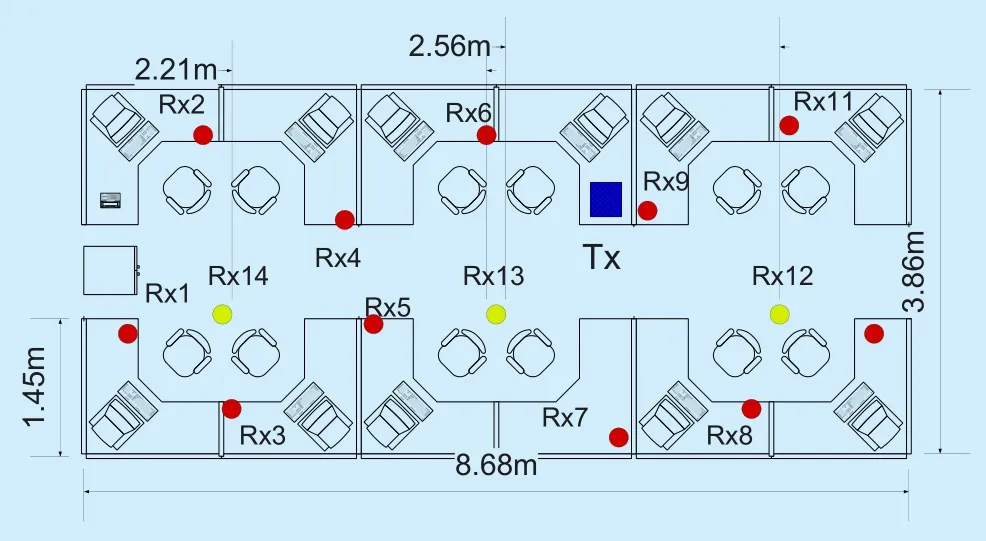
Fig.3.Layout of the mobile measurement environment.
5.2 Measurement validation
To evaluate the performance,proposed localization method,Cifiand Confihave been compared.The main difference among the three methods is the construction of the CSI image,so the same CNN formerly introduced as the Shuff l eNet V2 is used to deal with the three different kinds of CSI images.In order to adapt the CSI data of the Atheros AR9580 chipset,the Cifiimage is a 228 228× matrix whose values are normalized to a range of 0-255.The construction of the Confiimage keeps the same method introduced previously in Section I.
Table III presents the mean and standard deviation (STD) of localization errors of the proposed method,Cifiand ConFi.The proposed method achieves a mean error of 1.5762 m and an STD error of 0.6812 m which outperforms the other two methods.This result proves that our proposed CSI image construction method contains more channel information than Cifiand Confiwhile the CNN works effectively in the extraction of the CSI features.
Figure 4 presents the cumulative distribution function (CDF) of distance errors of the three methods.
The proposed method has 79% of the test locations having an error less than 2 m,while that for Cifiis 38% and that for Confiis 26%.About 98% of the test locations for the proposed method have an error under 3 m while the percentage of test locations having a smaller error than 3 m is 59% and 52% for Cifiand ConFi.Therefore,the localization method proposed achieves best performance among the three methods in this experiment.This is mainly because the novel CSI image construction method contains more information which makes the features among different RPs differ much larger.
5.3 Impact of system parameters
To study the impact of the channel size of CSI images,the localization errors of CSI imageswith complete 3 channels and CSI images without the first sub-image which is the amplitudes of the CSI on each subcarrier of the first antenna of the 114 packet samples are compared in Table IV and figrue 5.The mean error and STD error of the CSI images with 2 channels are 3.2410 m and 1.7108 m.The percentages of test locations for CSI images with 3 channels having a smaller error than 1 m,2 m,3 m are 24%,79%,98% while those for CSI images with 2 channels are 13%,32%,43%.It is shown that CSI images with 3 channels contains more features than CSI images with 2 channels.
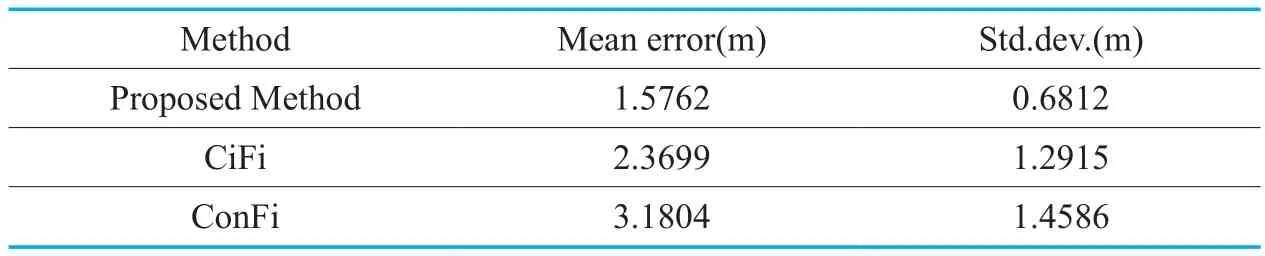
Table III.Localization errors of the three localization methods.
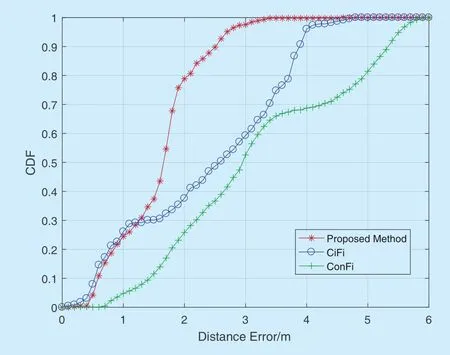
Fig.4.Comparison of the performance among proposed method,Cifiand ConFi.
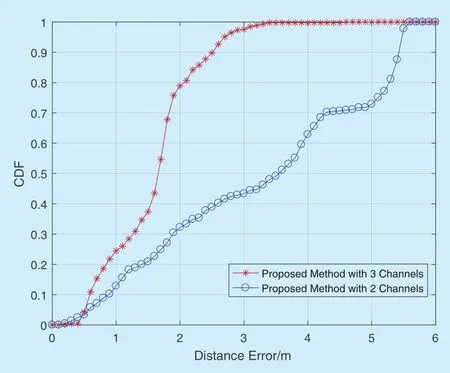
Fig.5.Comparison of the performance between proposed method with 3 channels and 2 channels.
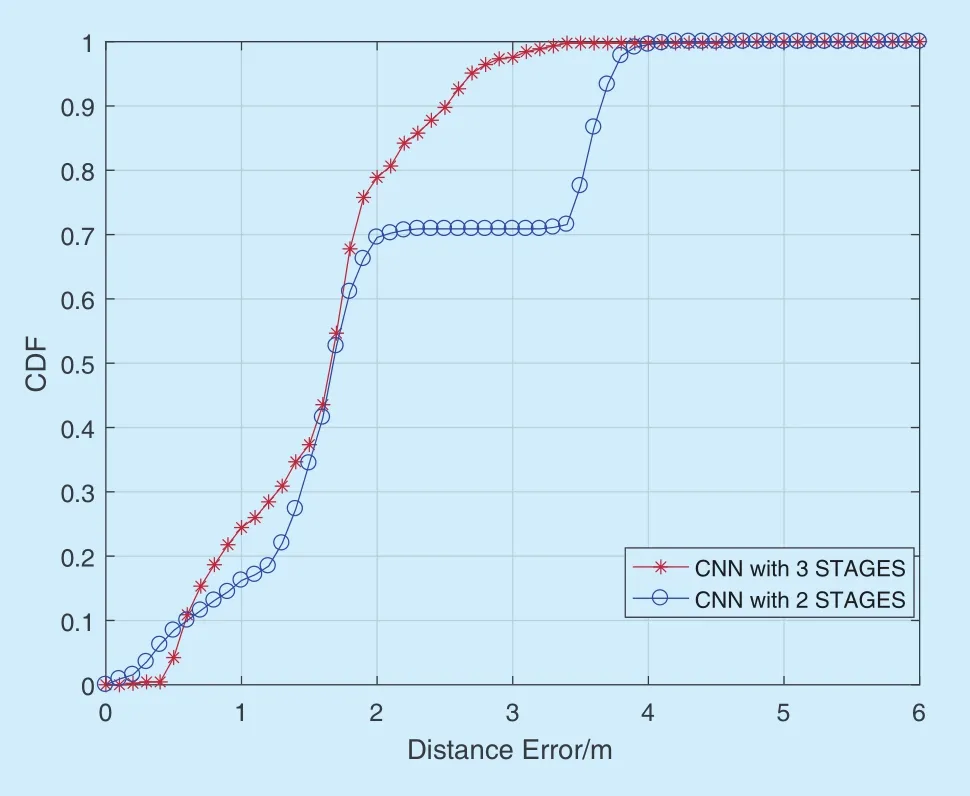
Fig.6.Comparison of the performance between CNN with 3 stages and 2 stages.
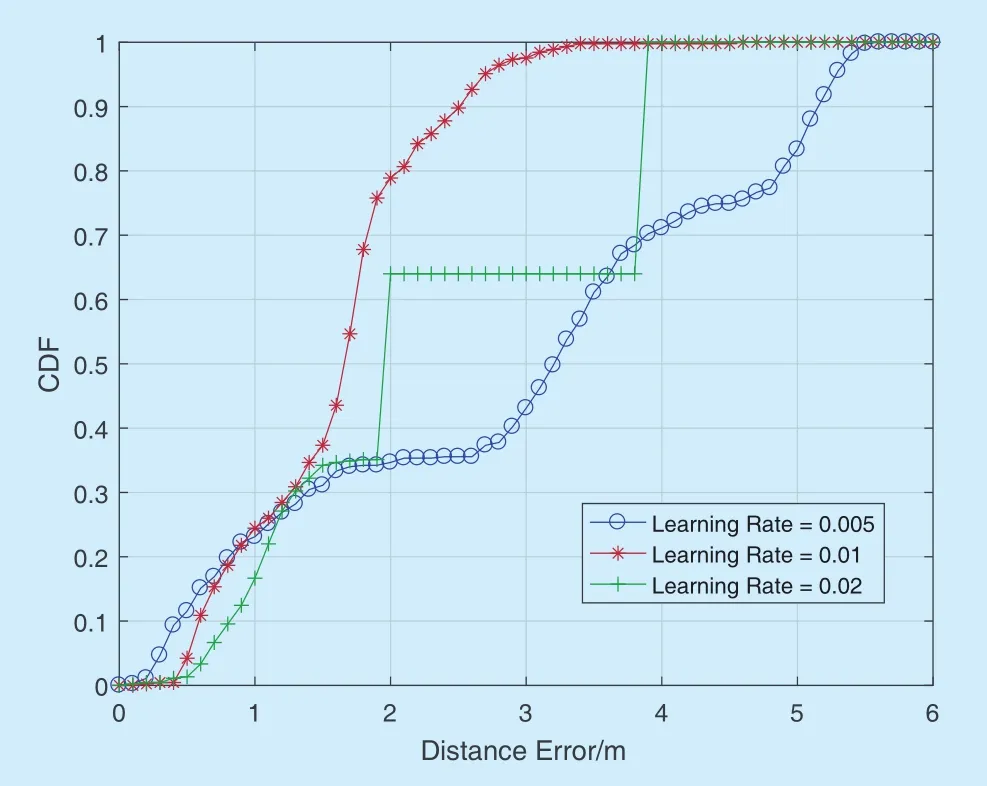
Fig.7.Comparison of the performance among learning rate =0.005,0.01,0.02.

Table IV.Localization errors of CSI images with 3 channels and 2 channels.

Table V.Localization errors of different stages.
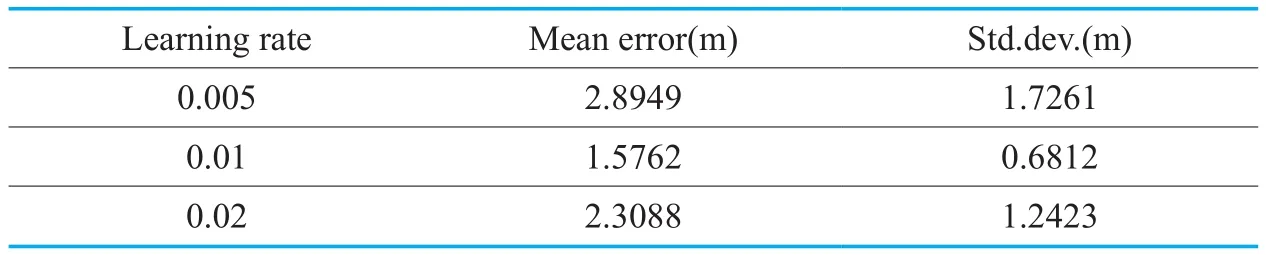
Table VI.Localization errors of different learning rates.
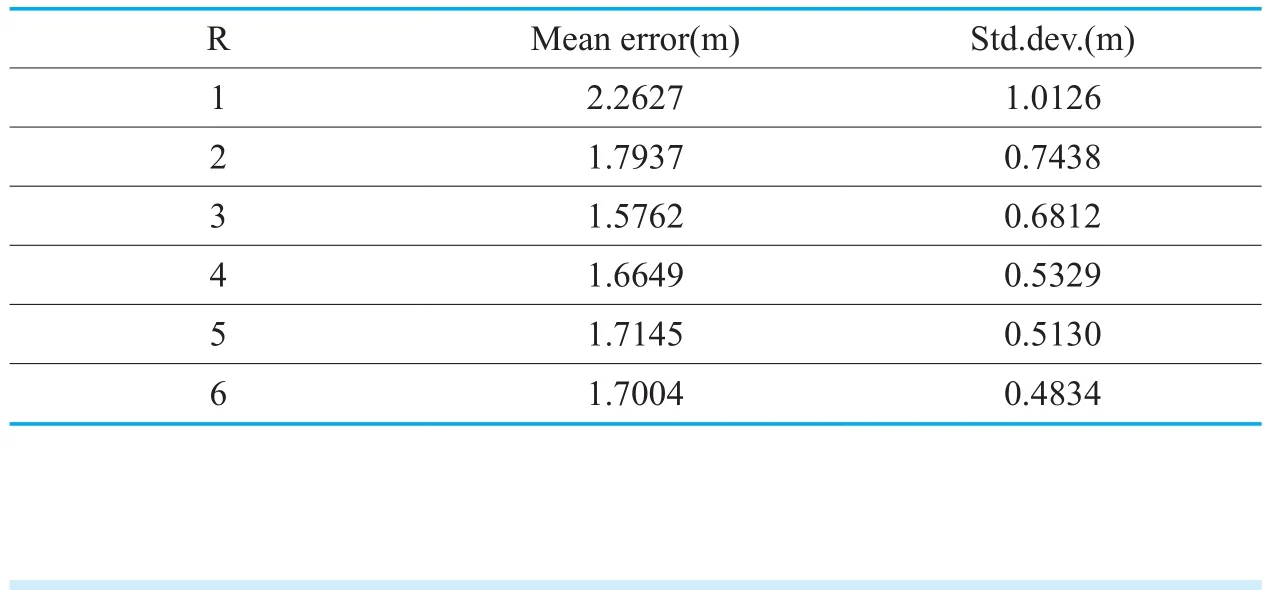
Table VII.Localization errors among different R.
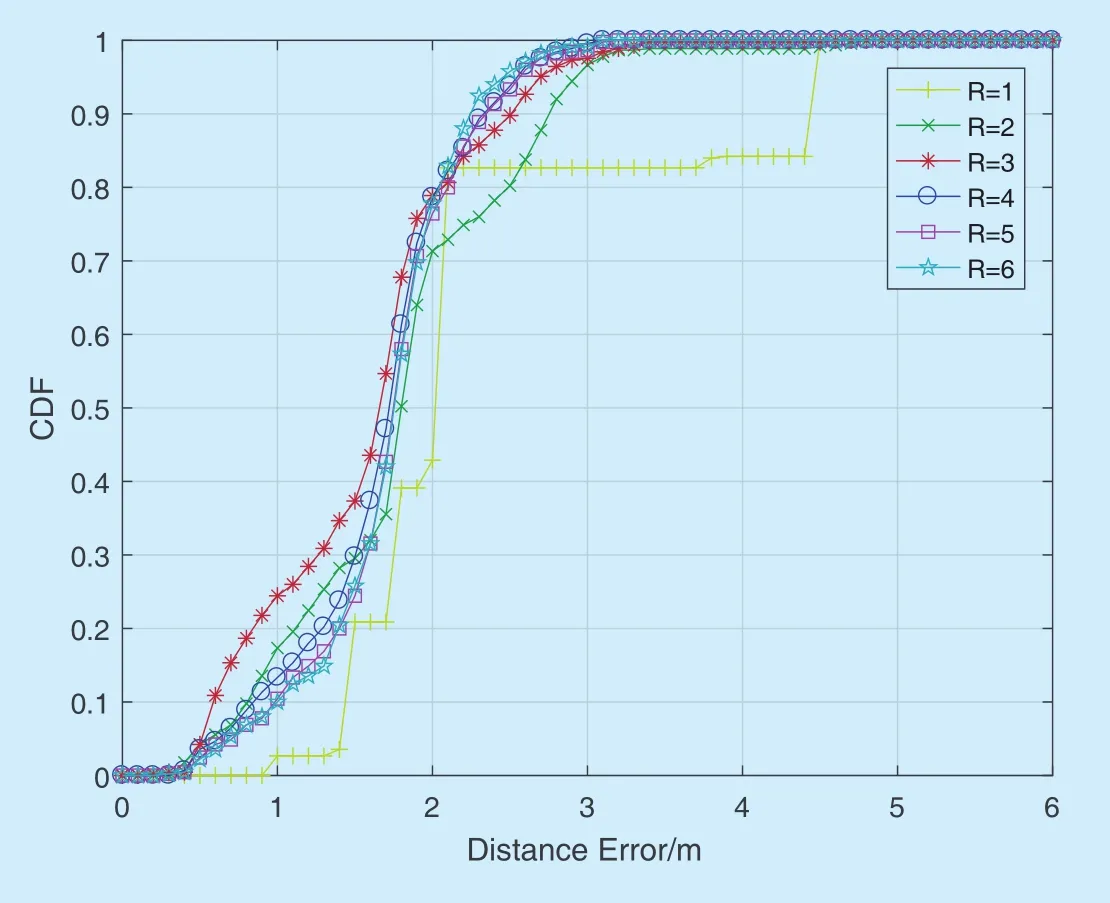
Fig.8.Comparison of the performance among R =1,2,3,4,5,6.
To study the impact of the depth of the CNN,the localization errors of the CNN with complete 3 stages and the CNN with 2 stages which does not have the third stage are compared in Table V and figrue 6.The mean error and STD error of the CNN only having 2 stages are 2.0097 m and 1.1133 m.The percentages of test locations for the CNN with complete 3 stages having a smaller error than 1 m,2 m,3 m are 24%,79%,and 98% while those for the CNN with 2 stages are 16%,70%,71%.The result represents that the deeper the CNN is,the better the localization method proposed performs within a certain range.
To study the impact of the learning rate of the CNN,the localization errors of the CNN with a learning rate = 0.005,0.01,0.02 are compared in Table VI and figrue 7.The mean error of the CNN with the three different learning rates are 2.8949 m,1.5762 m and 2.3088 m.The result can be explained by a low learning rate may not allow the CNN to converge while a higher learning rate may not reach the best convergence point.Thus,the learning rate needs be chosen carefully in different experiments.
To study the impact of theRwhich is the number of the largest outputs to calculate the location of the target device,the localization errors of theR= 1,2,3,4,5,6 are compared in Table VII and figrue 8.The mean error of the of theR= 1,2,3,4,5,6 are 2.2627 m,1.7937 m,1.5762 m,1.6649 m,1.7145 m and 1.7004 m.When the value ofRis 3,the errors are the smallest.More RPs cannot reduce the localization error mainly because more RPs introduce more estimation errors.Besides,R=3 conforms to the principle of the triangular positioning.
VI.CONCLUSIONS
In this paper,a novel CSI image construction method is introduced which contains more CSI features than Cifiand ConFi.A light-weight CNN model is used to process the CSI images.With measurement data in an office room,it is proved that the CSI image construction method we proposed outperforms Cifiand Confiin indoor Wi-filocalization.
ACKNOWLEDGEMENT
This work is supported by the National Natural Science Foundation of China (No.61631013),National Key Basic Research Program of China (973 Program) (No.2013CB329002),National Major Project (NO.2018ZX03001006-003).

- China Communications的其它文章
- A Study on Service-Oriented Smart Medical Systems Combined with Key Algorithms in the IoT Environment
- Research on Multicloud Access Control Policy Integration Framework
- Towards the Design of Ethics Aware Systems for the Internet of Things
- LLR Processing of Polar Codes in Concatenation Systems
- Cooperative Relay Based on Exploiting Hybrid ARQ
- Initialization for NMF-Based Audio Source Separation Using Priors on Encoding Vectors