
一個具有Filippov控制的植物疾病模型的研究
2019-06-24 06:09張?zhí)锾?/span>楊友蘋
張?zhí)锾?楊友蘋
(山東師范大學(xué)數(shù)學(xué)與統(tǒng)計學(xué)院,山東 濟南 250014)
1 引言
植物疾病作為全球重大關(guān)注問題之一,不僅在于植物疾病可以造成不可估計的經(jīng)濟損失,嚴重影響全球經(jīng)濟發(fā)展,而且在一定程度上決定了人類的生存,對控制植物疾病至關(guān)重要.到目前為止,已有很多數(shù)學(xué)家運用常微方程模型,脈沖微分方程模型等來研究植物疾病問題[1],提出的措施包括噴灑殺蟲劑,釋放害蟲天敵等,但這些措施實施的同時又會對環(huán)境造成一定程度的污染,甚至?xí)茐囊欢▍^(qū)域內(nèi)的生態(tài)平衡,因此需要更合理的措施來控制植物疾病的發(fā)展.目前已有人提出了可以通過補植無病植株或者移除染病植株等措施來達到控制植物疾病發(fā)展的目的[2-5],并建立了具有經(jīng)濟閾值和人文控制策略的植物疾病模型,例如文獻[6]提出了一個具有成比例生長率的Filippov植物疾病模型,研究了五種類型平衡點的全局穩(wěn)定性;文獻[7]在此基礎(chǔ)上改變了植物的增長方式,考慮了一個常數(shù)輸入的生長率.然而我們發(fā)現(xiàn)考慮一個具有Logistic增長的生長率相對于植物種群更具有現(xiàn)實意義.因此,本文以感染植株作為控制目標,當染病植株數(shù)量達到一定的經(jīng)濟閾值時,就采取綜合疾病控制策略,即補植無病植株和移除染病植株,否則不采取任何措施.
2 Filippov植物疾病模型
本文建立如下植物疾病模型:

且

其中S(t)和I(t)分別表示易感植株和感染植株在t時刻的數(shù)量,a表示易感植株的內(nèi)稟增長率,表示環(huán)境容納量,β表示感染率,η1和η2分別表示易感植株和感染植株的死亡率,同時假設(shè)a>η1,p表示易感植株的補植率,v表示感染植株的移除率.令

則系統(tǒng)(1)和系統(tǒng)(2)可轉(zhuǎn)化為如下模型,

定義2.1 (i)Σ?M是滑動段,當且僅當在Σ上有1(Z)>0且

(ii)Σ1?M是逃逸區(qū),當且僅當在 Σ1上有,其中表示向量積,n=(0,1)T表示H在M上的梯度.
定義2.2 (i)如果F1(D)=0,H(D)<0,或F2(D)=0,H(D)>0,則稱D是真平衡點;
(ii)如果F1(D)=0,H(D)>0,或F2(D)=0,H(D)<0,則稱D是假平衡點;
(iii)如果λF1(D)+(1?λ)F2(D)=0,H(D)=0,其中 0<λ<1,
則稱D是偽平衡點.
注2.1 由定義可知,只要軌線穿過不連續(xù)邊界M,系統(tǒng)動力學(xué)就會改變,故一個假平衡點不可能穩(wěn)定.
3 全系統(tǒng)的動力學(xué)性態(tài)
3.1 子系統(tǒng) Gi(i=1,2)的動力學(xué)性態(tài)
子系統(tǒng)G1可以寫成如下形式:

由再生矩陣可得 (3)式的基本再生數(shù)[8-9]為.明顯地,系統(tǒng) (3)存在一個零平衡點E0=(0,0),無病平衡點和一個地方病平衡點

引理3.1 零平衡點E0=(0,0)是鞍點;如果R1<1,無病平衡點局部漸近穩(wěn)定;如果R1>1,地方病平衡點局部漸近穩(wěn)定.
證明系統(tǒng)(3)的雅克比矩陣如下

由a>η1,則 detJ1(E0)=η2(η1?a)<0,故E0是一個鞍點;當R1<1時,
故E10局部漸近穩(wěn)定;當R1>1時,?tr(J1(E1))>0,det(J1(E1))>0,故E1局部漸近穩(wěn)定,此時det(J1(E10))<0,則E10是一個鞍點.
引理3.2系統(tǒng)(3)在無極限環(huán).
證明令定義Dulac函數(shù)
定理3.1 如果R1<1,無病平衡點E10全局漸近穩(wěn)定;如果R1>1,地方病平衡點E1全局漸近穩(wěn)定.
證明由引理3.1可知,當R1<1時,無病平衡點E10是局部漸近穩(wěn)定的;且由引理3.2可知,系統(tǒng)(3)在無極限環(huán),故當R1<1時,無病平衡點E10是全局漸近穩(wěn)定的.同理,當R1>1時,地方病平衡點E1是全局漸近穩(wěn)定的.
其次,子系統(tǒng)G2可以寫成如下形式:,對于在單連通區(qū)域內(nèi)的軌線,有

子系統(tǒng)G2的基本再生數(shù)為:
同樣子系統(tǒng)G2存在一個零平衡點E0=(0,0),無病平衡點和一個地方病平衡點
同理于子系統(tǒng)G1的討論,有如下結(jié)論:
定理3.2 如果R2<1,無病平衡點E20全局漸近穩(wěn)定;如果R2>1,地方病平衡點E2全局漸近穩(wěn)定.
3.2 全系統(tǒng)的動力學(xué)性態(tài)
為保證系統(tǒng)(1)正平衡點的存在性,下面只需討論R1>1及R2>1時全系統(tǒng)的動力學(xué)行為.由定義 2.1可知,當且時,即

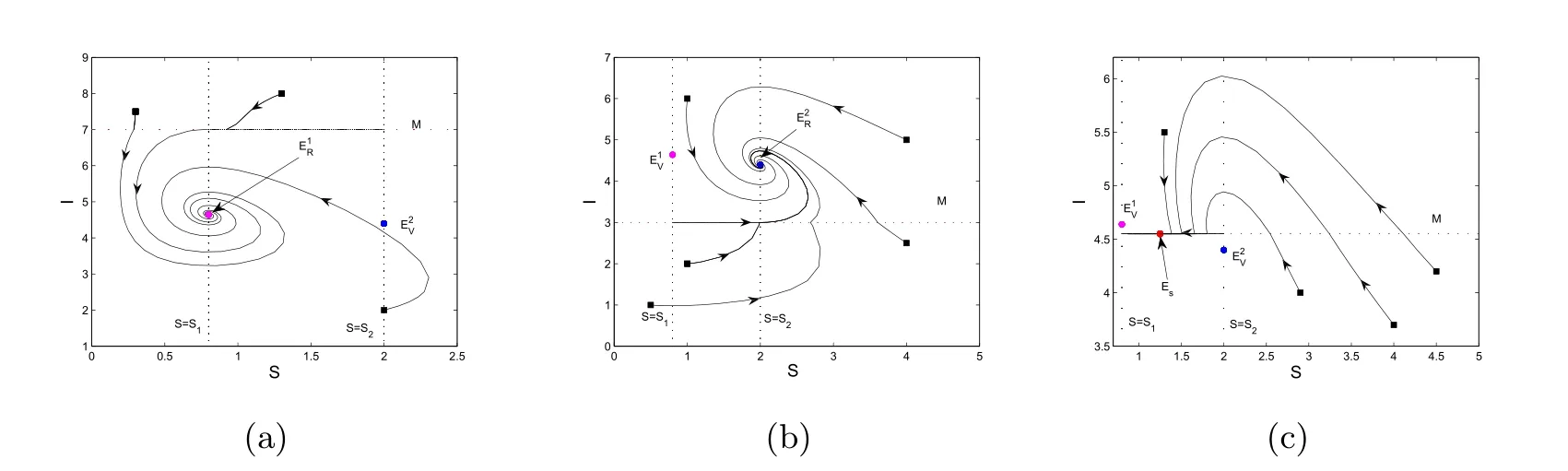
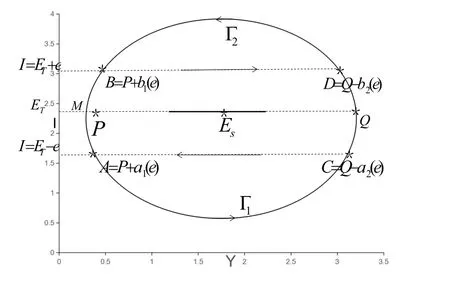
且S1 令g(S(t))=0,得 為保證平衡點的存在性,假設(shè)S?>0,即,則系統(tǒng) (5)存在唯一的滑動平衡點Es=(S?,ET),當且僅當S1 從而g(S(t))關(guān)于S是單調(diào)遞減的,故當Es存在時,Es是局部漸近穩(wěn)定的. 依據(jù)閾值ET的取值不同,系統(tǒng)(1)的正平衡點的真假性以及偽平衡點的存在性也不同,通過數(shù)值模擬(見圖1),做出如下三種情況的猜測: 圖1 (a),(b),(c)分別表示系統(tǒng)(1)真平衡點ER1,真平衡點ER2和偽平衡點Es的全局穩(wěn)定性相圖,切平面 M(I=ET),滑動段為 S1S2.η1=0.2,η2=0.4,p=0.6,v=0.6,a=0.3,b=0.2.(a)ET=4.55;(b)ET=7;(c)ET=3. 情況3.1 如果I2 定理3.3 如果I2 證明由引理3.2可知,在子系統(tǒng)G1中無極限環(huán).同理可證,在子系統(tǒng)G2中無極限環(huán).下證在滑動段附近無極限環(huán).令假設(shè) Γ是滑動段附近的極限環(huán) (見圖 2),線M(I=ET)上下部分分別為 Γ1,Γ2.令Γ和M的交點為P,Q,Γ和線I=ET+e的交點為 Γ和線I=ET?e的交點為A=P+a1(e),C=Q?a2(e),其中e>0足夠小,a1(e),a2(e),b1(e)和b2(e)相對于e都是連續(xù)的,且 記Γ1和線段AC圍成的區(qū)域為D1,Γ2和線段BD圍成的區(qū)域為D2,由格林公式,有 圖2 在情況3.1下,對于系統(tǒng)(1)和系統(tǒng)(2)證明極限環(huán)Γ不存在的示意圖 這與系統(tǒng)(6)是矛盾的,從而在滑動段附近無極限環(huán).因此,如果I2 情況3.2 如果I2 此時,記真平衡點E1為,假平衡點E2為,偽平衡點Es不存在,因此所有起點在G2中的軌線,無論是否切中滑動段,軌線最終都會進入G1,所有G1中的軌線都會趨于,且是全局漸近穩(wěn)定的,因此無論軌線的起點是在G1還是G2,它們都將趨于.所以,當給定的經(jīng)濟臨界值取值較大時,系統(tǒng)的解最終穩(wěn)定在子系統(tǒng)G1中,感染植株數(shù)量低于經(jīng)濟臨界值. 情況3.3 如果ET 記假平衡點E1為,真平衡點E2為,在這種情況下,偽平衡點Es也不存在,則所有起點在G1中的軌線,無論是否切中滑動段,軌線最終都會進入G2,所有G2中的軌線都會趨于,且是全局漸近穩(wěn)定的,因此無論軌線的起點是在G1還是G2,它們都將趨于.所以,當給定的閾值取值較小時,系統(tǒng)的解最終穩(wěn)定在子系統(tǒng)G2中,感染植株數(shù)量高于經(jīng)濟臨界值.事實情況下,選擇一個相對較小的經(jīng)濟臨界值是不合理的,否則將會造成重大的經(jīng)濟損失. 本文研究了一個具有Logistic增長的植物疾病Filippov模型的動力學(xué)性質(zhì),得到了系統(tǒng)的基本再生數(shù)以及平衡點的存在性和穩(wěn)定性,并通過數(shù)值模擬預(yù)測了系統(tǒng)的全局穩(wěn)定性.結(jié)果表明,基于閾值的取值,系統(tǒng)的解最終穩(wěn)定在子系統(tǒng)的真平衡點或者滑動系統(tǒng)的偽平衡點.







4 結(jié)論
猜你喜歡
力學(xué)學(xué)報(2022年12期)2023-01-15第二課堂(小學(xué)版)(2022年5期)2022-05-26湖北工程學(xué)院學(xué)報(2021年3期)2021-06-16宜賓學(xué)院學(xué)報(2020年12期)2021-01-30數(shù)學(xué)物理學(xué)報(2019年6期)2020-01-13煙臺果樹(2019年1期)2019-01-28傳媒評論(2018年7期)2018-09-18青少年科技博覽(中學(xué)版)(2015年2期)2015-12-19IT時代周刊(2015年7期)2015-11-11爆笑show(2015年6期)2015-08-13
 純粹數(shù)學(xué)與應(yīng)用數(shù)學(xué)2019年1期
純粹數(shù)學(xué)與應(yīng)用數(shù)學(xué)2019年1期