
Pitch control strategy before the rated power for variable speed wind turbines at high altitudes *
2019-05-27 10:20:20MingweiGeWeimingKeHongxiaChen
水動(dòng)力學(xué)研究與進(jìn)展 B輯 2019年2期
Ming-wei Ge, Wei-ming Ke, Hong-xia Chen
1. School of Renewable Energy, North China Electric Power University, Beijing102206, China
2. School of Energy Power and Mechanical Engineering, North China Electric Power University, Beijing 102206,China
Abstract: The wind turbines in the world’s highest wind farm with an altitude of over 4 000 m in Naqu county of China were put into operation in 2014. Compared with the wind turbines at lower altitudes, the rated wind speed of these wind turbines are much larger, and the corresponding tip-speed ratio at the rated power reduces significantly due to the lower air density. Hence, the power coefficient at the point of the rated power is decreased to a rather low level. To improve the performance of the wind turbines at very high altitudes, this paper proposes a new pitch control strategy for variable speed wind turbines at the constant-speed phase,especially at the rated-speed phase before the rated power is reached. It is shown that the new pitch control strategy works very well for the wind farms at very high altitude and with low air density, with the catch of the wind energy enhanced and the aerodynamic loads significantly reduced.
Key words: Wind turbine, pitch control strategy, high altitudes
Introduction
The wind power is a kind of clean energy with wide prospective applications. Over the past ten years,the wind power industry in China has made a considerable progress. In 2014, China’s wind power industry saw a good momentum of development; the new wind power installed capacity refreshed the record.According to statistics of Chinese Wind Energy Association (CWEA), 13 121 wind turbines were installed in 2014, with a capacity of 23 196 MW and a yearly growth of 44.2%. The accumulative installed wind turbines reached 76 241 with a capacity of 114 609 MW. Since 2012, the wind power generation has become the third largest source of electric generation in China, after the thermoelectricity power generation and the hydroelectricity generation. Up to now, the areas with good wind resources, easy for the commercial development, are almost all covered, left most of the offshore regions, low wind speed regions as well as high-altitude regions still to be explored. In the southwest of China, the altitude is very high, and the wind recourses are abundant. Take Tibet as an example,the annual wind energy resources reach 77.3 KW×109 KW[1]. Besides, in some of these regions, the coverage of grid is not complete, and the electric power supply is still a problem.
In 2013, the first five wind turbines were installed in the world’s highest altitude wind farm,Naqu, with an altitude of over 4 000 m. According to the measurements, for every increase of 1 000 m in altitude, the relative atmospheric pressure is reduced by about 12%, and the air density is reduced by about 10%. Due to the decrease of air density, the aerodynamic performance of the wind turbines changes dramatically. Figure 1 shows the power curves of a 1.5 MW wind turbine at different altitudes.At the altitude of 0 km with a standard atmosphere air density, the rated wind speed is about 10.6 m·s-1,while at the altitude of 4 km, the rated wind speed is increased to 22.3 m·s-1. For a certain wind turbine,some technologies may be adopted to enhance the catch of wind power, such as the optimization of the pitch control strategy[2], the application of vortex generators on the blades[3-4], and the optimization of the control algorism for variable speed[5-6]. In this paper, the main focus is on the pitch control strategy.
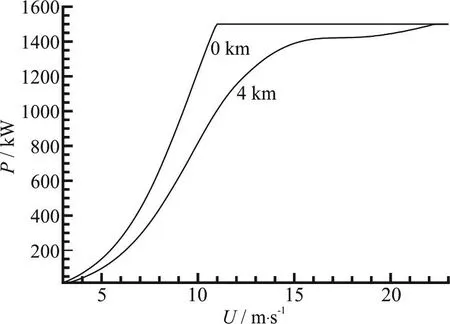
Fig. 1 Power curves of a 1.5 MW wind turbine at different altitudes
The pitch control technology is widely used in large wind turbines. During the power production of wind turbines, the pitch control is used primarily to limit the power in cases of big winds[7]. Generally,when the output power is below the rated power, the pitch angle of the blades is placed at a point of near zero by the controller and remains unchanged, when it is above the rated power, the pitch mechanism starts to work, adjusting the pitch angle according to the wind condition, to maintain the rated power of the generator. Thus, most of the studies of the pith control focus on the smoothing of the power capture and the reduction of overloading of the wind turbines above the rated wind speeds. The active pitch regulation was introduced by Sharma et al.[8]above the rated wind speed to reduce the wind generator output fluctuations and finally resulted in a significant improvement of the output power quality. To limit the variable speed system to its ratings without inducing mechanical and electrical stresses due to the wind gusts and/or the control process, both the pitch control and the electrical power control were adopted by Horiuchi and Kawahito[9]. The pitch control was used to restrict the rotational speed of the wind rotors, while the generator power control was adopted to suppress the torque and power fluctuations. As an extension, the pitch angle control was also introduced by Duong et al.[10], Senjyu et al.[11]for all operating regions of the wind turbine systems to smooth the output power fluctuations. In view of the limitation of the pitch actuator, an insight into the relations between the power regulation and the maximum allowable pitch rate was gained by Bianchi et al.[12]to improve the controller design. After that, an artificial neural network-based pitch angle controller for the wind turbines was proposed by Yilmaz and ?zer[13], to both regulate the power output and prevent the overloading of the wind turbine significantly during the period of high wind speed. To achieve a further loading reduction for modern wind turbines, the individual pitch control technology was also studied extensively[14-17]. This traditional pitch control strategy above the rated wind power really works in the low-altitude region, without losing much wind power,but on a wind farm of a very high altitude, such as the wind power projects in Naqu County, Tibet, the southwestern region of China, a considerable loss of the wind power energy will be caused. At very high altitudes, the rated wind speed of the wind turbines increases to a very high value due to the low density of air, resulting in a very small tip-speed ratio at the rated power. Under this condition, the wind turbines operate with a very low power coefficient at high wind speeds before the rated condition is reached and substantial power losses will be caused due to the fixed pitch angle. To improve the performance of the wind turbines at high altitudes, this paper proposes a new pitch control strategy based on the stage before the rated power is reached in the present study.
1. The loss of power coefficient at very high altitude and the new pitch control strategy
1.1 The loss of power coefficient at very high altitude
The 1.5 MW wind turbine of UP77 designed by the United Power Company is taken as an example.UP77 is a horizontal axis wind turbine with three blades, which are large scale produced and commercially available in China from 2007. It is a variable-speed wind turbine with a high speed ratio gearbox and a double-fed induction generator. Above the rated power, the traditional pitch angle control strategy based on the PI technique is used for the power control. The main parameters are shown in Table 1.
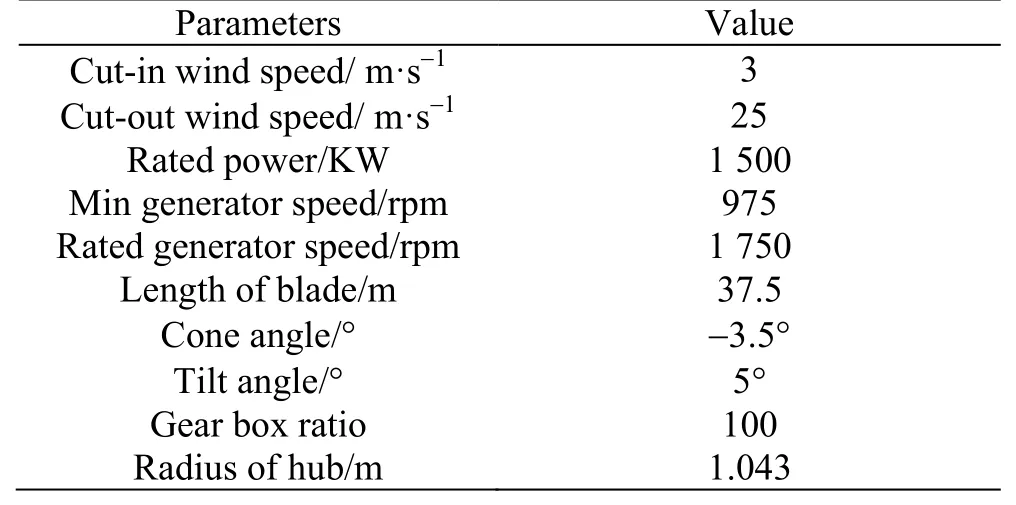
Table 1 Main parameters of the 1.5 MW wind turbine
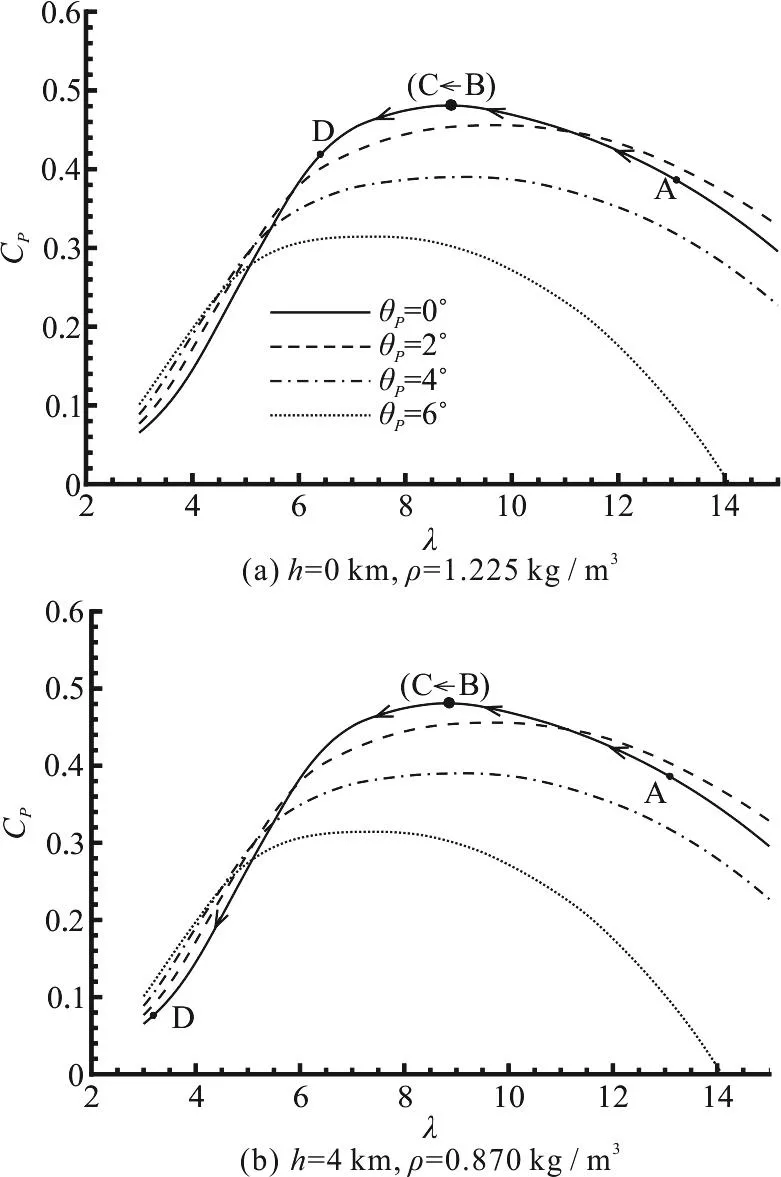
Fig. 2 Operation of the 1.5 MW wind turbine on C P-λ curves at different altitudes, traditional pitch control starts at the point D
The well validated software GH-Bladed-V4.2 is adopted to make the evaluation. With different pitch angles, the wind turbine operates on different CP-λ curves. Figure 2 shows a group of CP-λ curves for the 1.5 MW wind turbine UP77 with different pitch angles. Let us recall the operation process of the wind turbine on CP-λ curves. At the cut-in wind speed,the wind rotor cuts in at the minimum rotational speed with a high tip-speed ratio (point A). In the cut-in stage, the speed of the wind rotor keeps constant along with the increase of the wind speed, and thus the operating CPcan quickly slip to the peak point of the CP-λ curve (A-B). When the operating CPreaches the maximum CP, that is, λ=λopt, the operation goes into the second stage (the optimum tip-speed ratio stage). In this stage, the wind rotor adjusts its speed to keep ΩR/ U =λopt, when the wind speed changes (B-C in Fig. 3). Due to the limitation of the speed of the wind rotor, the wind turbine will soon go into the third stage, if the wind speed continues to increase. In the third stage, the wind rotor keeps its rated rotational speed, and the operating point slips to the left side of the CP-λ curve with the increase of the wind speed (C-D). Finally, if the wind speed exceeds the rated wind speed, the wind turbine starts to restrict the output power around the rated power through the pitch control (after D). In the constant-speed stage C-D, the pitch angle of the wind turbine keeps a value of about zero, and the power coefficient gradually reduces with the decrease of the tip-speed ratio (the increase of the wind speed). The operation of the wind turbine at two different altitudes(0 km, 4 km) are shown in Figs. 2(a), 2(b). As is shown, at the altitude of 0 km, the point D, on which the wind turbine achieves its rated power, is closely located on the left side of λopt. During the process from C to D, the value of CPon the CP-λ curve with θP=0 is larger than that on other CP-λ curves, hence in this case, the traditional pitch control strategy does work without losing any power coefficient. But for the high-altitude wind farm with a very low air density, the rated wind speed is very large,which makes the tip-speed ratio at the rated power very small, in this case, setting θP=0in the whole stage from C to D will cause considerable losses of power, as shown in Fig. 2(b). Consequently, for very high-altitude wind farms, through the pitch control before the rated power is reached, more power can be extracted than by only setting θP=0. Of course, the ideal condition is that the wind rotor can operate on the cap of all CP-λ curves. On the cap, the optimal potential efficiency of the energy conversion is achieved, as can be realized by the pitch angle control.It is worth mentioning that except the stage C-D, the idea can also be used in the cut-in stage A-B.
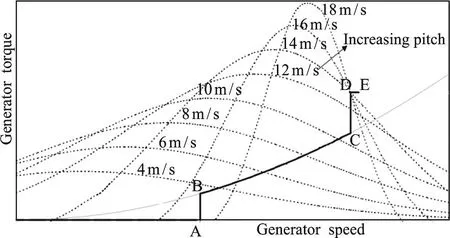
Fig. 3 Schematic diagram of the four phases of control for a variable-speed pitch-regulated wind turbine[18]
1.2 The new pitch control strategy
According to the idea described in Section 2.1,the cap of the group of CP-λ curves for various θPcan be obtained as Fig. 4(a) for the 1.5 MW wind turbine UP77. Correspondingly, the θP-λ curve is presented in Fig. 4(b) and the θP-v curves for the rated speed stage C-D and the cut-in stage A-B are,respectively, shown in Figs. 4(c), 4(d). For the stage C-D, the new control strategy is only used for the wind turbines at high altitudes with low air density. If the wind turbine runs with a rated wind speed of less than 11.2 m/s, the pitch control strategy should be the traditional one, which means that the pitch angle keeps zero before the rated wind speed and starts to pitch after the rated wind speed is exceeded. If the air density is low enough and the rated wind speed is larger than 11.2 m/s, the new control strategy can be put into use before the rated power is reached. For the stage A-B, if a wind turbine starts up at 3 m/s, the regulating mechanism should slowly adjust the pitch of the blade from 90° to the direction of 0°, and then set the pitch angle to 1.7°. As the wind speed increases, the pitch angle should decrease slowly.When the wind speed reaches 4.5 m/s, the pitch angle decreases to zero. After that, the wind turbine runs into the second stage B-C, and the pitch angle keeps constant of near zero degree as the wind speed continues to increase.
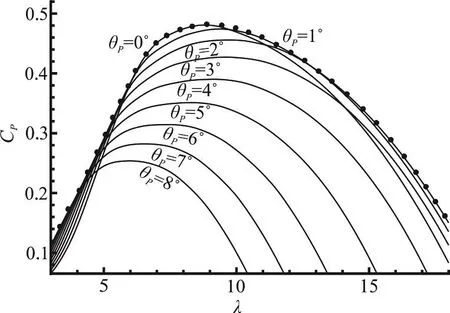
Fig. 4(a) CP-λ curves at various θP and their cap
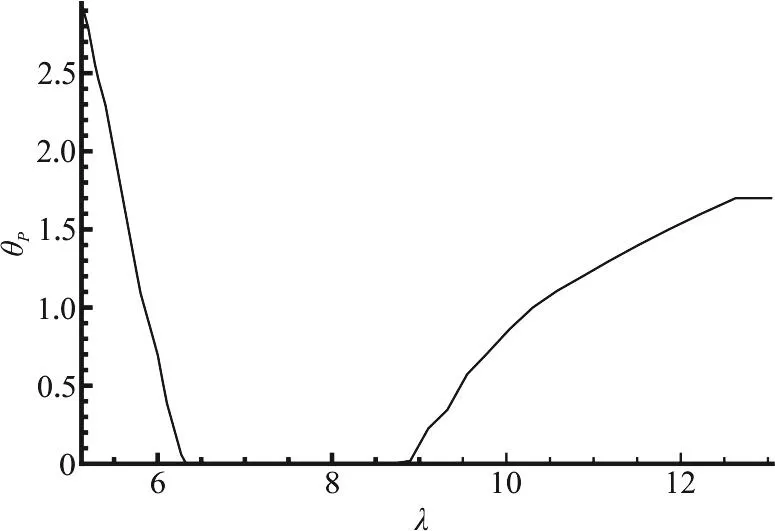
Fig. 4(b) Pθ for the maximum power coefficient at each λ
2. Simulation of the new control strategy
2.1 Steady simulation
The steady power curve and the load of the 1.5 MW wind turbine are computed through the software GH-Bladed 4.2, as an integrated software package for the wind turbine performance and the loading that has been certificated by GL[19]. The steady power curves of the 1.5 MW wind turbine at different altitudes are shown in Fig. 5. In the cut-in stage, the output power can be considerably increased by using the new pitch control strategy. At 3 m/s, the output power is increased by 12.4%. At 4.5 m/s, the pitch angle is set back to zero, hence the power curve by using the new pitch control strategy and the power curve by using the traditional pitch control strategy are overlapped. In this stage, the percentage of the power gain obtained by the new pitch control strategy keeps unchanged at different altitudes since the value of CPof a wind turbine is only determined by the tip-speed ratio. It should be noted that the improvement in the cut-in stage by adopting the new pitch control strategy contributes only a little to the annual energy power,less than 0.5%, since the wind speed is very small, and in this case, the wind turbine only obtains a rather low power.

Fig. 4(c) θP -v curve in the rated-speed stage C-D
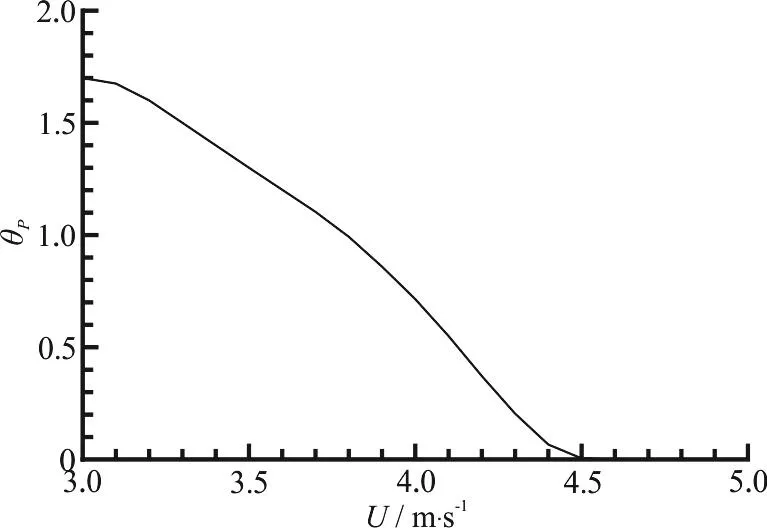
Fig. 4(d) θP -v curve in the rated-speed stage A-B
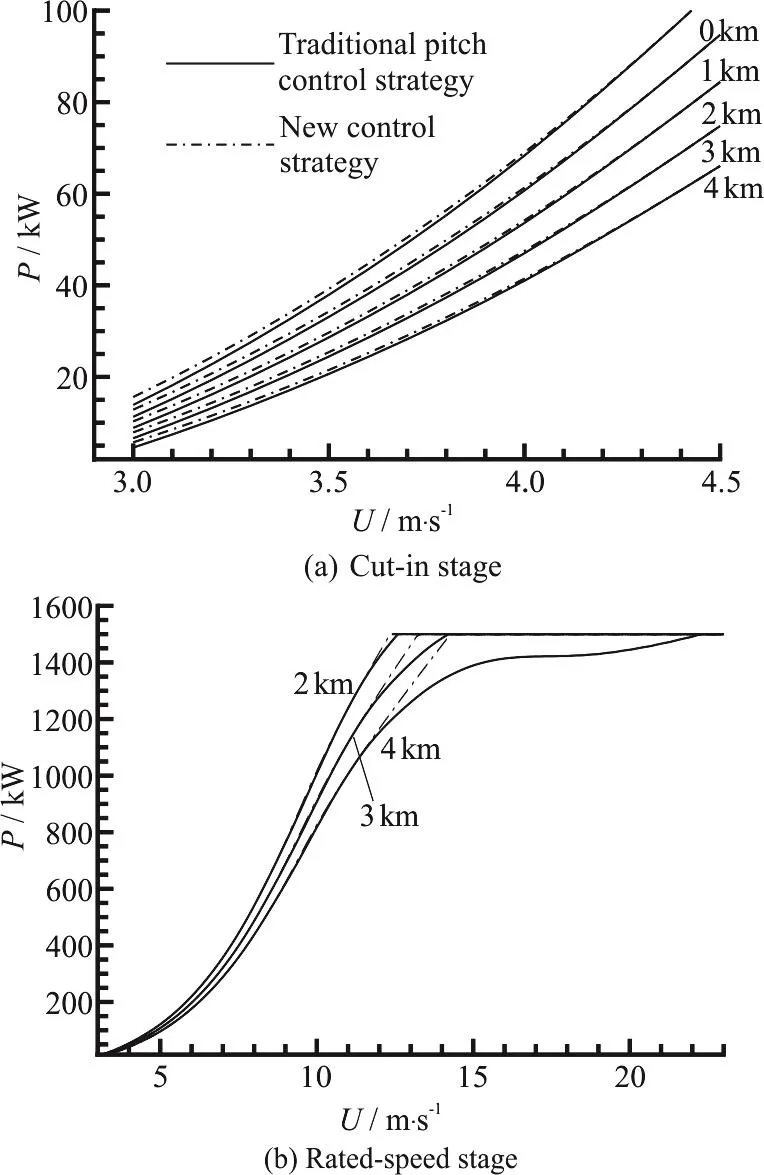
Fig. 5 Steady power curves of the 1.5 MW wind turbine at different altitudes

Table 2 AEP of the wind turbine at different annual average wind speeds
In the rated-speed stage, on the sea level, the rated wind speed is less than 11.2 m/s, the new pitch control strategy will not be put into use. At low altitudes, the effectiveness of the new pitch control strategy is not so obvious. At the altitude of 2 km, as is shown in Fig. 5(b), the power at the velocity of 11.3 m/s is increased by 2.04%, and the rated wind speed is shifted from 11.5 m/s to 11.3 m/s. At the altitude of 3 km,the power is increased by 5.4% at the velocity of 13.2m/s, while the rated wind speed is changed to 13.3 m/s from the original value of 14.3 m/s. As can be seen, the improvement increases with the increase of the altitude. At the altitude of 4 km, the power is increased, the rated wind speed is reduced to 14.3 m/s from 22.3 m/s. In very high-altitude regions, the rated-speed stage of the wind turbines covers a long wind velocity section, which considerably contributes to the total output power. The annual energy production (AEP) of the wind turbine at different annual average wind speeds is shown in Table 2.AEPT denotes the AEP with the traditional pitch strategy while AEPN is obtained with the new pitch control strategy employed in the stage C-D (see Fig.3). The probability distribution of the mean wind speed is approximated by a Weibull distribution with the shape coefficient k=2. As can be observed in Table 2, the improvement due to the new pitch strategy is significant for the operation of the wind turbines at very high altitudes. At h=4km, when VA=8.5 m/s ,the output power can be increased by about 2.94%.
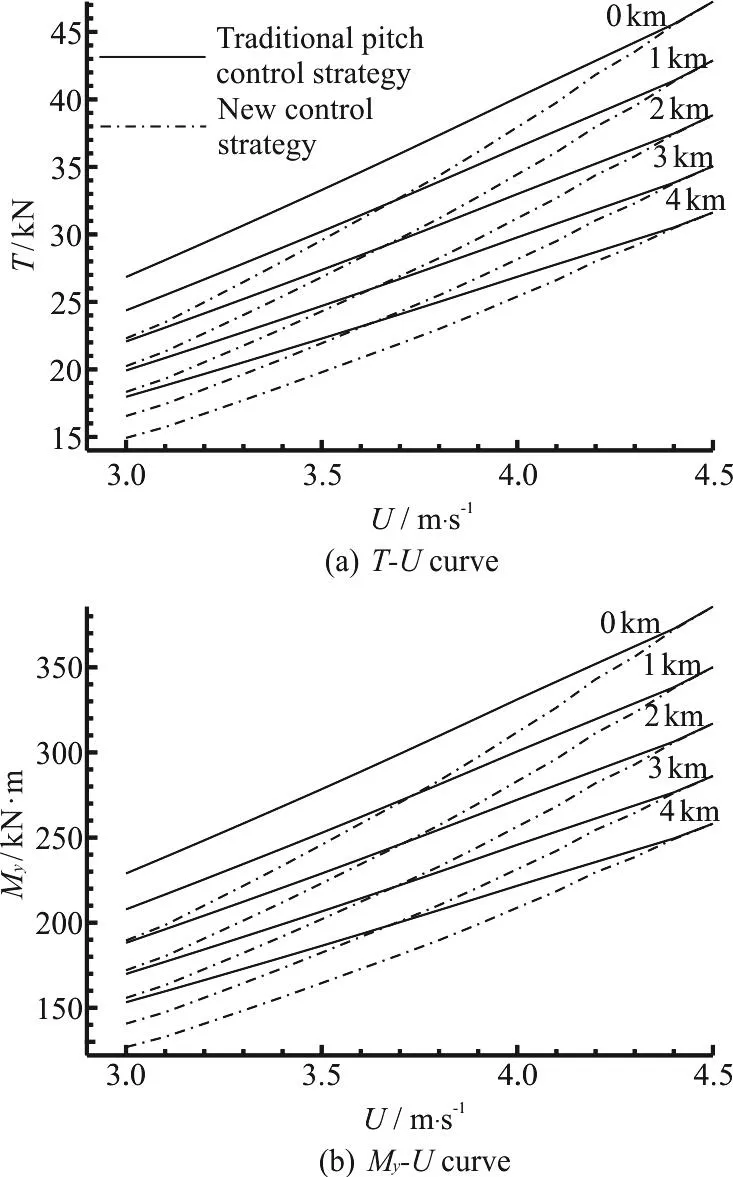
Fig. 6 Comparison between the traditional pitch control strategy and the new control strategy of the 1.5 MW wind turbine at different altitudes in the cut-in stage
The thrust (T) of a wind rotor and the flap-wise moment on a blade root (My) ar e th e most important input loads forthedesignofthetowerand the blades for wind turbines. Here, some results about T, Myare also given to show the influence of the new control strategy on the loads of the wind turbine.Figure 6 shows the thrust force T and the blade root moment Myas functions of the wind speed in the cut-in stage. With the new pitch control strategy, both the thrust of the wind rotor and the flap-wise moment are reduced. At the velocity of 3 m/s, the thrust and the flap-wise moment decline by 16.93%, 17.2%,respectively. With the decrease of the tip speed ratio,the pitch angle returns to zero and the load finally is recovered to the original level. Similar to the steady power curves, the change rate of the load does not vary with the altitudes, and it is only related with the tip-speed ratio. The new pitch control strategy can significantly improve the power performance and reduce the load in the cut-in stage, indeed. However,the reduction of the load has little effect on the ultimate load, because the dangerous load condition rarely occurs in this stage.
The ultimate thrust of the wind rotor only happens at the rated power or before it is reached in the steady simulation. After the rated power is reached,the blades start to pitch further and the thrust force will sharply go down. For clarity, Fig. 7(a) just gives the thrust force against the wind speed for the 1.5 MW wind turbine before the rated power is reached. At the altitude of 1 km, the rated-speed stage is very short,because the reduction of the air density is rather small as compared with that at the altitude of 0 km. The maximum thrust force is reducedonly by 1.3%. At the altitude of 2 km, the maximum thrust is decreased by about 3%, while it is decreased by about 5.54% at 3 km.For the wind farm at the altitude of 4 km, the thrust force is reduced by about 19.3% due to a significant reduction of the rated speed. It is indicated that with the new pitch control strategy, the thrust is unchanged or reduces a little due to the short rated- speed stage in the low-altitude regions, but the thrust reduces significantly in the high-altitude regions.
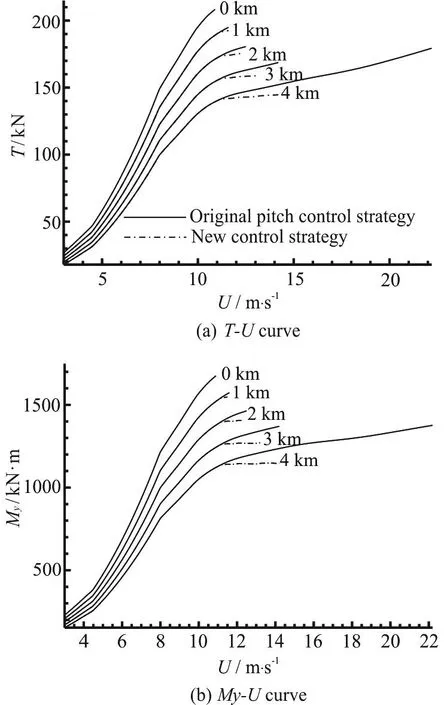
Fig. 7 Comparison between the original pitch control strategy and the new control strategy of the 1.5 MW wind turbine at different altitudes
Similar to the maximum thrust of the wind rotor,Fig. 7(b) shows the flap-wise moment of the blade root at different altitudes. At the altitude of 1 km, the reduction of the maximum flap-wise moment is about 1.7%. At the altitude of 2 km, the rated speed is slightly reduced owing to the positive pitch angle,resulting in a decrease of the flap-wise moment of about 4%. At 3 km, the reduction can be about 7.28%,while at 4km, the decrease can amazingly be up to 16.68%. The results show that the flap-wise moment of the blade root can be greatly suppressed in the high-altitude regions with the new pitch control strategy. But in the low-altitude regions, the strategy only makes a little difference for the reduction of the flap-wise moment.
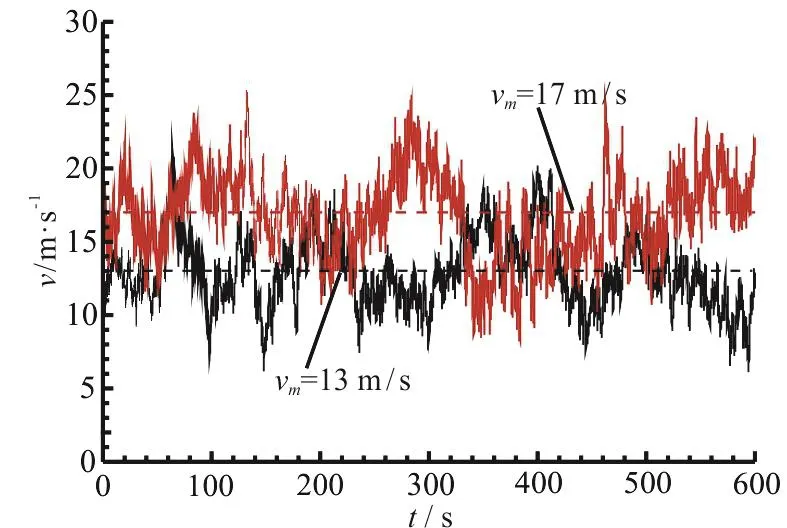
Fig. 8 (Color online) Time traces of the hub longitudinal wind speed of the turbulent winds generated by GH-Bladed using NTM
2.2 Unsteady simulation
The normal turbulence model (NTM) in IEC61400-1[20]is built to verify the effect of the new pitch control strategy. Here, a II-B class wind farm is considered in the calculation. The class II means that the vref=42.5m/s , vA=8.5m/s , where vrefis the reference wind speed average over 10 min, vAis the annual average wind speed. The class B means that I15=14%, where I15is the expected value of the turbulence intensity at 15 m·s-1. In the unsteady simulation, only the rated speed stage C-D, D-E is considered. The two 3-D turbulent winds with vm=13 m/s (wind 1), vm=17 m/s (wind 2) are generated by the Kaimal model to make the simulation for the 1.5 MW wind turbine, as shown in Fig. 8. The case of using the traditional pitch control strategy is also simulated for comparison. Figure 9 shows the time traces of the output power for wind 1,wind 2 at different altitudes. A significant increase of the output power is obtained through the new pitch control strategy at both the altitudes of 3 000 m,4 000 m. Figure 10 shows the time traces of the pitch angles of the wind turbine blades for the two specific winds. As can be observed, the pitch starts to work in advance clearly with the new control strategy. Figures 11, 12 show the time traces of T, My, respectively under different conditions. A significant reduction of the ultimate loads can be observed with the new pitch control strategy at very high altitudes. For a quantitative comparison, the time-average output power and the ultimate loads are shown in Table 3. As a steady simulation, with the new pitch control strategy, one obtains a better performance and a smaller ultimate load in the high altitude regions under the unsteady conditions. In this study, the classic blade element momentum theory (BEMT) is used to take the simulations, future work will focus on the influence of the pitch control strategy on the wind-turbine wakes resorting to high fidelity tools[21-22]based on computational fluid dynamics.
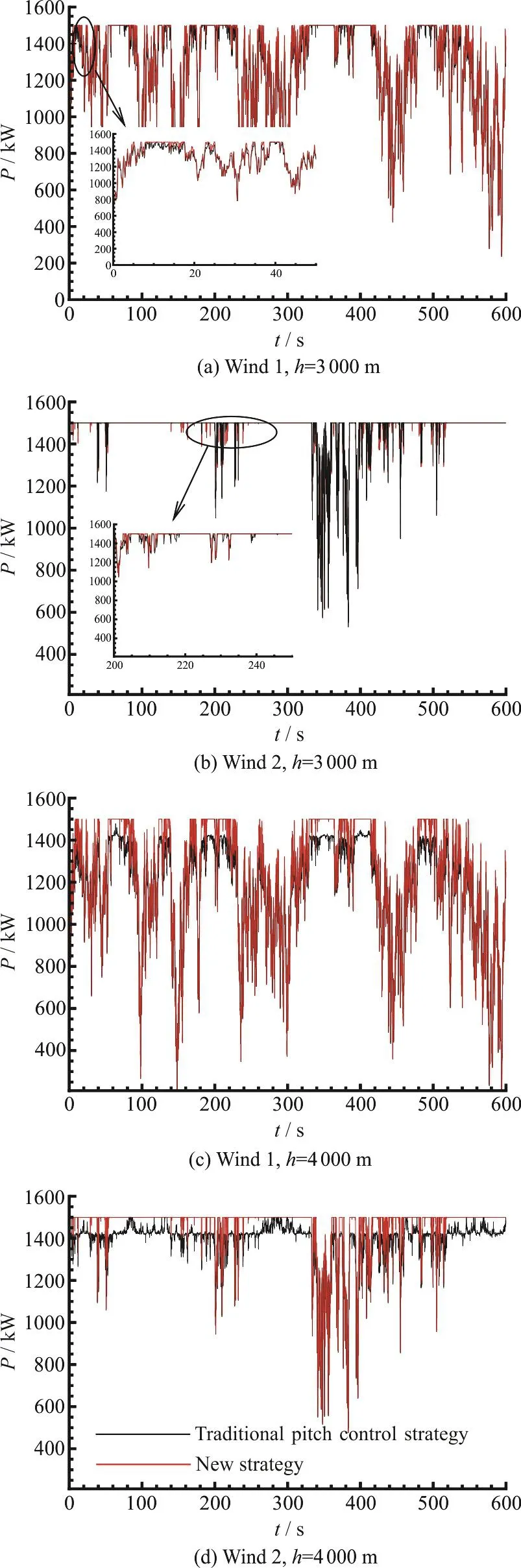
Fig. 9 (Color online) Time traces of the output power
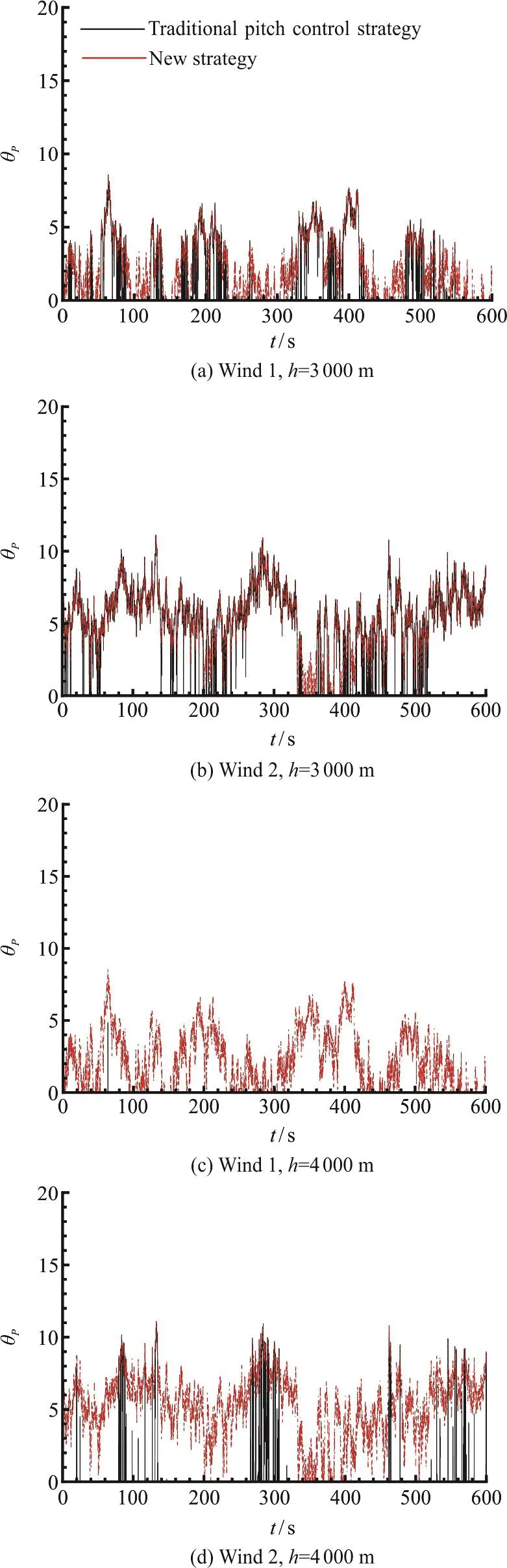
Fig. 10 (Color online) Time traces of the pitch angles of the wind turbine blades
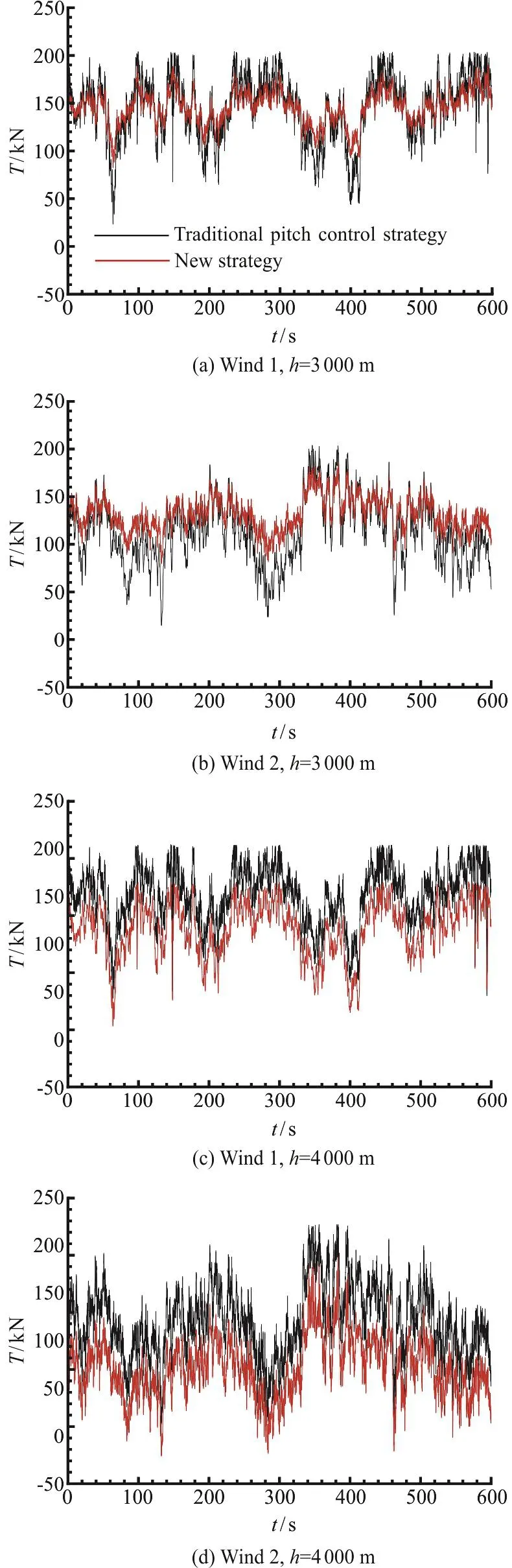
Fig. 11 (Color online) Time traces of the thrust forces of the wind rotor

Fig. 12 (Color online) Time traces of My on the root of blade

Table 3 Time-averaged output power P and the ultimate loads for the unsteady simulation
3. Conclusion
This paper proposes a new pitch control strategy at the rated-speed stage before the rated power is reached for variable speed wind turbines operating at very high altitudes. To show the advantages of the new pitch control strategy, the 1.5 MW wind turbine from United Power Company is taken as an example.The steady simulation shows that the new pitch control strategy can notably improve the performance of the wind turbines at very high altitudes. At the altitude of 3 km, the output power at a single point can be increased by 4.56%, as the maximum. The ultimate thrust of the wind rotor and the flap-wise moment of the blade root can be reduced by 5.54%, 9.7%,respectively. At the altitude of 4 km, the output power at a single point can be increased by 9.7%, as the maximum. The ultimate thrust of the wind rotor and the flap-wise moment are reduced by 19.3% and 16.68%, respectively. For a more convincing verification, two turbulent winds based on the NTM model in IEC61400-1 are considered to make an unsteady simulation. The results from the unsteady simulation also give a similar conclusion as from the steady simulation. In summary, the new pitch control strategy is good for the very high-altitude wind power project.The pitch control in the cut-in constant-speed stage is also investigated in the present study. But it is not discussed in details here for its insignificant effect.
Acknowledgements
This work was supported by the Fundamental Research Funds for the Central Universities (Grant Nos. 2018ZD09, 2017MS022). The authors would like to express their gratitude to the United Power Company for the UP77 wind turbine model.
 水動(dòng)力學(xué)研究與進(jìn)展 B輯2019年2期
水動(dòng)力學(xué)研究與進(jìn)展 B輯2019年2期
- 水動(dòng)力學(xué)研究與進(jìn)展 B輯的其它文章
- Effectiveness of radiative heat flux in MHD flow of Jeffrey-nanofluid subject to Brownian and thermophoresis diffusions *
- Three-dimensional flow field simulation of steady flow in the serrated diffusers and nozzles of valveless micro-pumps *
- Numerical study on variation characteristics of the unsteady bearing forces of a propeller with an external transverse excitation *
- Analysis of the flow characteristics of the high-pressure supercritical carbon dioxide jet *
- Investigation of the stability and hydrodynamics of Tetrosomus gibbosus carapace in different pitch angles *
- Study of flow characteristics within randomly distributed submerged rigid vegetation *